
In our application build with SDK 2.7.0 on a NRF52840 chip, we get an assert if we update the TX_Power for the connections.
If the bluetooth has made connection, we update the TX power.
}
static void connected(struct bt_conn *conn, uint8_t err)
{
char addr[BT_ADDR_LE_STR_LEN];
int ret;
if (err) {
LOG_ERR("Connection failed (err %u)", err);
return;
}
bt_addr_le_to_str(bt_conn_get_dst(conn), addr, sizeof(addr));
LOG_INF("Connected %s", addr);
current_conn = bt_conn_ref(conn);
LOG_INF("current_conn %d", current_conn);
ret = bt_hci_get_conn_handle(current_conn,&conn_handle);
LOG_INF("conn_handle %d", conn_handle);
if (ret)
{
LOG_ERR("No connection handle (err %d)\n", ret);
}
else
{
set_tx_power(BT_HCI_VS_LL_HANDLE_TYPE_CONN, conn_handle, TX_POWER);
}
}
static void set_tx_power(uint8_t handle_type, uint16_t handle, int8_t tx_pwr_lvl)
{
struct bt_hci_cp_vs_write_tx_power_level *cp;
struct bt_hci_rp_vs_write_tx_power_level *rp;
struct net_buf *buf, *rsp = NULL;
int err;
buf = bt_hci_cmd_create(BT_HCI_OP_VS_WRITE_TX_POWER_LEVEL,
sizeof(*cp));
if (!buf) {
LOG_ERR("Unable to allocate command buffer\n");
return;
}
cp = net_buf_add(buf, sizeof(*cp));
cp->handle = sys_cpu_to_le16(handle);
cp->handle_type = handle_type;
cp->tx_power_level = tx_pwr_lvl;
err = bt_hci_cmd_send_sync(BT_HCI_OP_VS_WRITE_TX_POWER_LEVEL,
buf, &rsp);
if (err) {
uint8_t reason = rsp ?
((struct bt_hci_rp_vs_write_tx_power_level *)
rsp->data)->status : 0;
LOG_INF("Set Tx power err: %d reason 0x%02x\n", err, reason);
return;
}
rp = (void *)rsp->data;
LOG_INF("Actual Tx Power: %d\n", rp->selected_tx_power);
net_buf_unref(rsp);
}
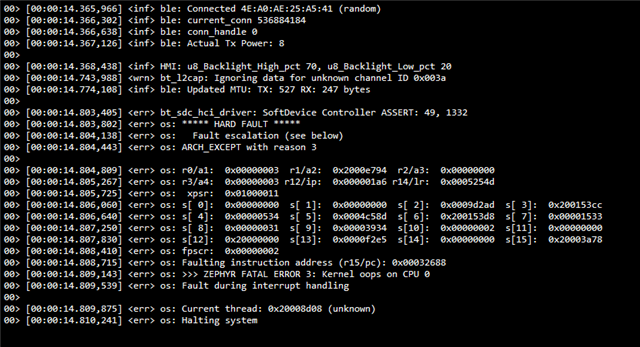
code works fine if we disable the row: set_tx_power(BT_HCI_VS_LL_HANDLE_TYPE_CONN, conn_handle, TX_POWER);
if the row is enabled we get an assert on the bt_sdc_hci_driver
We recently update our code from SDK 2.6.0 to 2.7.0 and enabled sysbluild.
In SDk 2.6.0 we used the same code, and this has not triggert any failure.
what can be the cause of this fault?

