Vidar Berg has been helping me connect to a device and I am finally able to do that, but as soon as I do, Zephyr crashes.
This is with a lightly modified central_uart project
[00:00:00.024,810] <0x1b>[0m<inf> central_uart: Scan module initialized<0x1b>[0m␍␊
[00:00:00.024,810] <0x1b>[0m<inf> central_uart: NUS Client module initialized<0x1b>[0m␍␊
[00:00:00.029,846] <0x1b>[0m<inf> central_uart: Scanning successfully started<0x1b>[0m␍␊
[00:00:00.093,719] <0x1b>[0m<inf> central_uart: Filters matched. Address: E8:A0:DB:24:21:62 (random) connectable: 1<0x1b>[0m␍␊
[00:00:00.289,886] <0x1b>[0m<inf> central_uart: Connected: E8:A0:DB:24:21:62 (random)<0x1b>[0m␍␊
[00:00:00.290,039] <0x1b>[1;33m<wrn> central_uart: Failed to set security: -12<0x1b>[0m␍␊
[00:00:00.290,100] <0x1b>[1;31m<err> central_uart: Stop LE scan failed (err 0)<0x1b>[0m␍␊
[00:00:00.441,497] <0x1b>[0m<inf> central_uart: MTU exchange done<0x1b>[0m␍␊
ASSERTION FAIL [conn] @ WEST_TOPDIR/zephyr/subsys/bluetooth/host/gatt.c:5433␍␊
⇥ invalid parameters␍␊
␍␊
[00:00:01.791,351] <0x1b>[0m<inf> central_uart: Service discovery completed<0x1b>[0m␍␊
[00:00:01.800,994] <0x1b>[1;31m<err> os: r0/a1: 0x00000004 r1/a2: 0x00001539 r2/a3: 0x20000b60<0x1b>[0m␍␊
[00:00:01.800,994] <0x1b>[1;31m<err> os: r3/a4: 0x00000004 r12/ip: 0x00000000 r14/lr: 0x000217df<0x1b>[0m␍␊
[00:00:01.801,025] <0x1b>[1;31m<err> os: xpsr: 0x21000000<0x1b>[0m␍␊
[00:00:01.801,025] <0x1b>[1;31m<err> os: Faulting instruction address (r15/pc): 0x00031072<0x1b>[0m␍␊
[00:00:01.801,086] <0x1b>[1;31m<err> os: >>> ZEPHYR FATAL ERROR 4: Kernel panic on CPU 0<0x1b>[0m␍␊
[00:00:01.801,116] <0x1b>[1;31m<err> os: Current thread: 0x20002568 (BT RX WQ)<0x1b>[0m␍␊
[00:00:01.869,415] <0x1b>[1;31m<err> os: Halting system<0x1b>[0m␍␊
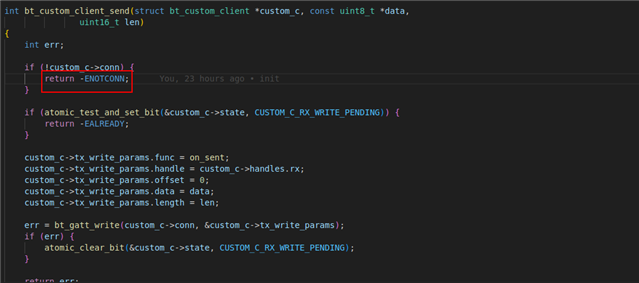
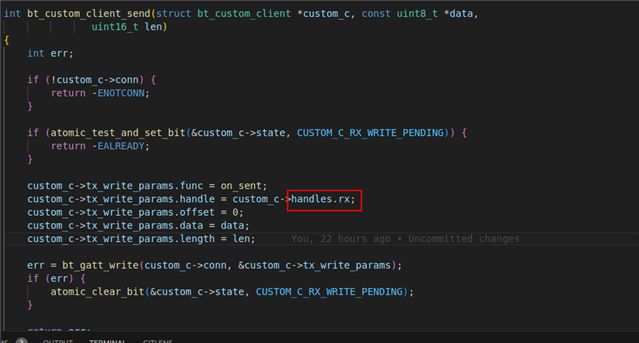
The program crashes here:
Which is in
The prototype for the function is this:
The values passed look reasonable to me.
len = 30
type ends up with "random" in it.
I am assuming
The string being used is that is passed into bt_addr_le_to_str is: