In my project I have a BME280 that starts OFF, and I interface with SPI.
The system then turns the power supply and the bme280 is powered.
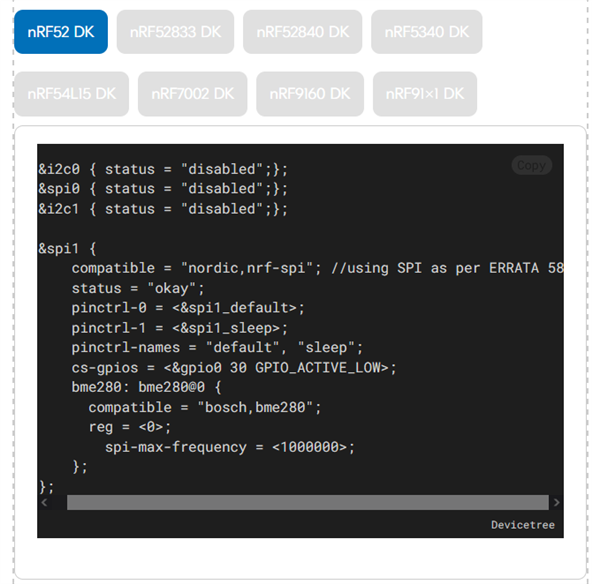
At this stage the bme280 needs to be configurated, with the devicetree and .conf configurations.
To do this, I call pm_device_action_run(dev_bme, PM_DEVICE_ACTION_RESUME) to run the static int bme280_chip_init(const struct device *dev) internally.
Before passing to PM_DEVICE_ACTION_RESUME I also placed it into PM_DEVICE_ACTION_SUSPEND and then into PM_DEVICE_ACTION_RESUME.
/* main.c - Application main entry point */
/*
* Copyright (c) 2015-2016 Intel Corporation
*
* SPDX-License-Identifier: Apache-2.0
*/
#include <zephyr/types.h>
#include <stddef.h>
#include <zephyr/sys/printk.h>
#include <zephyr/sys/util.h>
#include <zephyr/drivers/gpio.h>
#include <zephyr/devicetree.h>
#include <zephyr/logging/log.h>
#include <zephyr/pm/device_runtime.h>
#include <zephyr/bluetooth/bluetooth.h>
#include <zephyr/bluetooth/hci.h>
#include <zephyr/device.h>
#include <zephyr/drivers/sensor.h>
#include <zephyr/pm/device.h>
#include <zephyr/drivers/adc.h>
#include <math.h>
LOG_MODULE_REGISTER(Log_Main, LOG_LEVEL_DBG);
#define DEVICE_NAME CONFIG_BT_DEVICE_NAME
#define DEVICE_NAME_LEN (sizeof(DEVICE_NAME) - 1)
#define BEACON_ALL_SENSOR_TESTING 1
#define DT_SPEC_AND_COMMA(node_id, prop, idx) \
ADC_DT_SPEC_GET_BY_IDX(node_id, idx),
/*
* Get a device structure from a devicetree node with compatible
* "bosch,bme280". (If there are multiple, just pick one.)
*/
static const struct device *get_bme280_device(void)
{
const struct device *const dev = DEVICE_DT_GET_ANY(bosch_bme280);
if (dev == NULL) {
/* No such node, or the node does not have status "okay". */
printk("\nError: no device found.\n");
return NULL;
}
// if (!device_is_ready(dev)) {
// printk("\nError: Device \"%s\" is not ready; "
// "check the driver initialization logs for errors.\n",
// dev->name);
// return NULL;
// }
printk("Found device \"%s\", getting sensor data\n", dev->name);
return dev;
}
static const struct device *get_lis2_device(void)
{
const struct device *const sensor = DEVICE_DT_GET_ANY(st_lis2dh);
if (sensor == NULL) {
printf("No device found\n");
return 0;
}
if (!device_is_ready(sensor)) {
printf("Device %s is not ready\n", sensor->name);
return 0;
}
printk("Found device \"%s\", getting sensor data\n", sensor->name);
return sensor;
}
/*
* Set Advertisement data. Based on the Eddystone specification:
* https://github.com/google/eddystone/blob/master/protocol-specification.md
* https://github.com/google/eddystone/tree/master/eddystone-url
*/
static const struct bt_data ad[] = {
BT_DATA_BYTES(BT_DATA_FLAGS, BT_LE_AD_NO_BREDR)
// BT_DATA_BYTES(BT_DATA_UUID16_ALL, 0xaa, 0xfe), //, 0x6E, 0x2A, 0x6F, 0x2A, 0x6D, 0x2A),
// BT_DATA_BYTES(BT_DATA_SVC_DATA16,
// 0xaa, 0xfe, /* Eddystone UUID */
// 0x10, /* Eddystone-URL frame type */
// 0x00, /* Calibrated Tx power at 0m */
// 0x00, /* URL Scheme Prefix http://www. */
// 'z', 'e', 'p', 'h', 'y', 'r',
// 'p', 'r', 'o', 'j', 'e', 'c', 't',
// 0x08) /* .org */
};
/* Set Scan Response data */
static struct bt_data sd[] = {
BT_DATA(BT_DATA_NAME_COMPLETE, DEVICE_NAME, DEVICE_NAME_LEN),
};
static void bt_ready(int err)
{
char addr_s[BT_ADDR_LE_STR_LEN];
bt_addr_le_t addr = {0};
size_t count = 1;
if (err) {
printk("Bluetooth init failed (err %d)\n", err);
return;
}
printk("Bluetooth initialized\n");
/* Start advertising */
err = bt_le_adv_start(BT_LE_ADV_PARAM(BT_LE_ADV_OPT_USE_IDENTITY, 0x07D0, 0x07FD, NULL), ad, ARRAY_SIZE(ad),
sd, ARRAY_SIZE(sd));
if (err) {
printk("Advertising failed to start (err %d)\n", err);
return;
}
/* For connectable advertising you would use
* bt_le_oob_get_local(). For non-connectable non-identity
* advertising an non-resolvable private address is used;
* there is no API to retrieve that.
*/
bt_id_get(&addr, &count);
bt_addr_le_to_str(&addr, addr_s, sizeof(addr_s));
printk("Beacon started, advertising as %s\n", addr_s);
}
static const uint16_t RTD_0 = 1000;
static const uint16_t RTD_100 = 1385;
static const uint16_t ResBridge = 845;
int main(void)
{
int err;
LOG_INF("Starting Beacon Demo\n");
/* Initialize the Bluetooth Subsystem */
err = bt_enable(bt_ready);
if (err) {
LOG_ERR("Bluetooth init failed (err %d)\n", err);
}
printk("DONE\n");
//sens_power_mosfet
const struct gpio_dt_spec mosfet = GPIO_DT_SPEC_GET(DT_NODELABEL(sens_power_mosfet), gpios);
err = gpio_pin_configure_dt(&mosfet, GPIO_OUTPUT_INACTIVE);
if (err != 0) {
LOG_ERR("Function 'gpio_pin_configure_dt' for 'mosfet' pin err code: %d", err);
return err;
}
err = gpio_pin_set_dt(&mosfet, 1);
if (err != 0) {
LOG_ERR("Function 'gpio_pin_set_dt' for 'RLed' pin err code: %d", err);
return err;
}
k_sleep(K_SECONDS(1));
const struct device *dev_bme = get_bme280_device();
// if (dev_bme == NULL) {
// return 0;
// }
err = pm_device_action_run(dev_bme, PM_DEVICE_ACTION_SUSPEND);
if(err){
LOG_ERR("BME device pm OFF failed: %d", err);
return 0;
}
k_sleep(K_SECONDS(1));
err = pm_device_action_run(dev_bme, PM_DEVICE_ACTION_RESUME);
if(err){
LOG_ERR("BME device pm RESUME failed: %d", err);
return 0;
}
k_sleep(K_SECONDS(1));
const struct device *dev_lis = get_lis2_device();
struct sensor_value temp, press, humidity, accelx, accely, accelz;
uint32_t count = 0;
while (1) {
#if BEACON_ALL_SENSOR_TESTING
sensor_sample_fetch(dev_bme);
sensor_channel_get(dev_bme, SENSOR_CHAN_AMBIENT_TEMP, &temp);
sensor_channel_get(dev_bme, SENSOR_CHAN_PRESS, &press);
sensor_channel_get(dev_bme, SENSOR_CHAN_HUMIDITY, &humidity);
printk("temp: %d.%06d; press: %d.%06d; humidity: %d.%06d\n",
temp.val1, temp.val2, press.val1, press.val2,
humidity.val1, humidity.val2);
int32_t tempaux = (temp.val1 * 100 + temp.val2 / 10000);
int32_t humaux = (humidity.val1 * 100 + humidity.val2 / 10000);
int32_t pressaux = (press.val1 * 100 + press.val2 / 10000);
//printk("tempaux: %d\n", tempaux);
sensor_sample_fetch(dev_lis);
sensor_channel_get(dev_lis, SENSOR_CHAN_ACCEL_X, &accelx);
sensor_channel_get(dev_lis, SENSOR_CHAN_ACCEL_Y, &accely);
sensor_channel_get(dev_lis, SENSOR_CHAN_ACCEL_Z, &accelz);
printk("accelx: %d.%06d; accely: %d.%06d; accelz: %d.%06d\n",
accelx.val1, accelx.val2, accely.val1, accely.val2,
accelz.val1, accelz.val2);
int32_t accelxaux = (accelx.val1 * 100 + accelx.val2 / 10000);
int32_t accelyaux = (accely.val1 * 100 + accely.val2 / 10000);
int32_t accelzaux = (accelz.val1 * 100 + accelz.val2 / 10000);
uint8_t checkMem = 0;
int16_t RTDTempInt = 0;
struct bt_data ad_aux[] = {
BT_DATA_BYTES(BT_DATA_FLAGS, BT_LE_AD_NO_BREDR),
BT_DATA_BYTES(BT_DATA_UUID16_ALL, 0xE5, 0xFE),
BT_DATA_BYTES(BT_DATA_SVC_DATA16, 0x6E, 0x2A, (uint8_t)(tempaux & 0xFF), (uint8_t)(tempaux >> 8)),
BT_DATA_BYTES(BT_DATA_SVC_DATA16, 0x6E, 0x2A, (uint8_t)(RTDTempInt & 0xFF), (uint8_t)(RTDTempInt >> 8)),
BT_DATA_BYTES(BT_DATA_SVC_DATA16, 0x6F, 0x2A, (uint8_t)(humaux & 0xFF), (uint8_t)(humaux >> 8)),
BT_DATA_BYTES(BT_DATA_SVC_DATA16, 0xEB, 0x2A, (uint8_t)count)
};
struct bt_data sd_aux[] = {
//BT_DATA_BYTES(BT_DATA_UUID16_ALL, 0x2A, 0x6E), // 0x015, 0x03, 0x0543),
BT_DATA_BYTES(BT_DATA_SVC_DATA16, 0x6D, 0x2A, (uint8_t)(pressaux & 0xFF), (uint8_t)(pressaux >> 8)),
BT_DATA_BYTES(BT_DATA_SVC_DATA16, 0x13, 0x27, (uint8_t)(accelxaux & 0xFF), (uint8_t)(accelxaux >> 8)),
BT_DATA_BYTES(BT_DATA_SVC_DATA16, 0x13, 0x27, (uint8_t)(accelyaux & 0xFF), (uint8_t)(accelyaux >> 8)),
BT_DATA_BYTES(BT_DATA_SVC_DATA16, 0x13, 0x27, (uint8_t)(accelzaux & 0xFF), (uint8_t)(accelzaux >> 8)),
BT_DATA_BYTES(BT_DATA_SVC_DATA16, 0xEB, 0x2A, checkMem)
};
bt_le_adv_update_data(ad_aux, ARRAY_SIZE(ad_aux), sd_aux, ARRAY_SIZE(sd_aux));
count++;
#endif // BEACON_ALL_SENSOR_TESTING
k_sleep(K_SECONDS(10));
}
return 0;
}
This is my config:
CONFIG_PM_DEVICE=y
CONFIG_PM_DEVICE_RUNTIME=y
CONFIG_BT=y
CONFIG_BT_DEBUG_LOG=y
CONFIG_BT_DEVICE_NAME="Test beacon" #Test beacon
#CONFIG_BT_CTLR_TX_PWR_PLUS_4=y
# CONFIG_BT_CTLR_TX_PWR_PLUS_3=y
CONFIG_BT_CTLR_TX_PWR_0=y
#CONFIG_BT_CTLR_TX_PWR_MINUS_4=y
#CONFIG_BT_CTLR_TX_PWR_MINUS_8=y
#CONFIG_BT_CTLR_TX_PWR_MINUS_12=y
#CONFIG_BT_CTLR_TX_PWR_MINUS_16=y
#CONFIG_BT_CTLR_TX_PWR_MINUS_20=y
#CONFIG_BT_CTLR_TX_PWR_MINUS_40=y
CONFIG_SENSOR_LOG_LEVEL_DBG=y
CONFIG_MAIN_STACK_SIZE=16384
CONFIG_SYSTEM_WORKQUEUE_STACK_SIZE=4096
CONFIG_ISR_STACK_SIZE=4096
#CONFIG_LOG_PROCESS_THREAD_STACK_SIZE=2048
This is the error:
*** Booting nRF Connect SDK v2.7.0-5cb85570ca43 ***
*** Using Zephyr OS v3.6.99-100befc70c74 ***
[00:00:00.004,272] <inf> Log_Main: main: Starting Beacon Demo
[00:00:00.004,394] <inf> bt_sdc_hci_driver: hci_driver_open: SoftDevice Controller build revision:
d6 da c7 ae 08 db 72 6f 2a a3 26 49 2a 4d a8 b3 |......ro *.&I*M..
98 0e 07 7f |....
[00:00:00.006,286] <inf> bt_hci_core: hci_vs_init: HW Platform: Nordic Semiconductor (0x0002)
[00:00:00.006,317] <inf> bt_hci_core: hci_vs_init: HW Variant: nRF52x (0x0002)
[00:00:00.006,378] <inf> bt_hci_core: hci_vs_init: Firmware: Standard Bluetooth controller (0x00) Version 214.51162 Build 1926957230
[00:00:00.007,232] <inf> bt_hci_core: bt_dev_show_info: Identity: E9:04:F6:A4:59:5D (random)
[00:00:00.007,263] <inf> bt_hci_core: bt_dev_show_info: HCI: version 5.4 (0x0d) revision 0x11fb, manufacturer 0x0059
[00:00:00.007,293] <inf> bt_hci_core: bt_dev_show_info: LMP: version 5.4 (0x0d) subver 0x11fb
Bluetooth initialized
Beacon started, advertising as E9:04:F6:A4:59:5D (random)
DONE
Found device "bme280@0", getting sensor data
[00:00:02.008,636] <dbg> BME280: bme280_chip_init: bad chip id 0x0
[36:16:02.036,315] <err> os: mem_manage_fault: ***** MPU FAULT *****
[36:16:02.078,552] <err> os: mem_manage_fault: Data Access Violation
[36:16:02.085,937] <err> os: mem_manage_fault: MMFAR Address: 0x20002bc0
[36:16:02.093,688] <err> os: esf_dump: r0/a1: 0x40004000 r1/a2: 0x20002528 r2/a3: 0x200024ff
[36:16:02.103,485] <err> os: esf_dump: r3/a4: 0x000006c1 r12/ip: 0x00000000 r14/lr: 0x00017881
[36:16:02.113,281] <err> os: esf_dump: xpsr: 0x81003814
[36:16:02.119,537] <err> os: esf_dump: Faulting instruction address (r15/pc): 0x00017820
[36:16:02.128,570] <err> os: z_fatal_error: >>> ZEPHYR FATAL ERROR 19: Unknown error on CPU 0
[36:16:02.138,000] <err> os: z_fatal_error: Fault during interrupt handling
[36:16:02.145,935] <err> os: z_fatal_error: Current thread: 0x200016e8 (unknown)
[36:16:02.154,205] <err> os: k_sys_fatal_error_handler: Halting system
My problem is that the MPU FAULT only happens when the while is ran as is. If a sensor_channel_get(...) function or the ble function are commented the MPU FAULT no longer appears.
This lead me to believe that it was a lack of main stack but i also increased that.