devicetree overlay file
// * Connecting ADC channels
// For more help, browse the DeviceTree documentation at docs.zephyrproject.org/.../index.html
// You can also visit the nRF DeviceTree extension documentation at docs.nordicsemi.com/.../ncs_configure_app.html
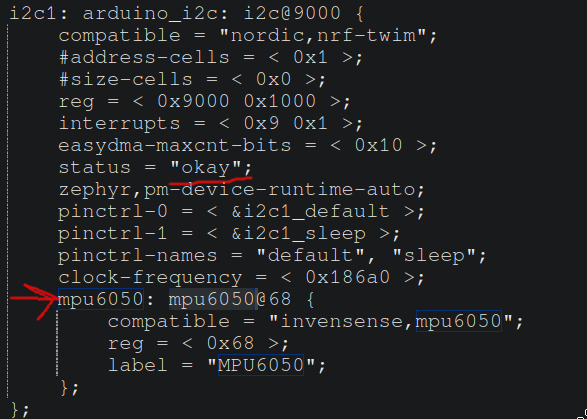
&i2c1 {
status = "okay";
mpu6050@68 {
compatible = "invensense,mpu6050";
reg = <0x68>;
label = "MPU6050";
};
};
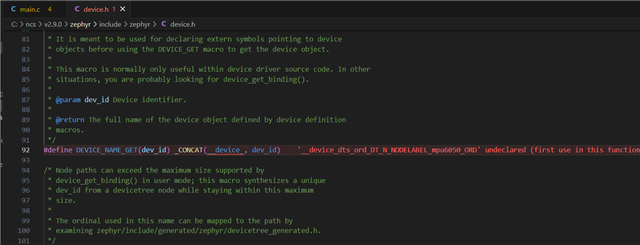
error in device .h file how to rectify



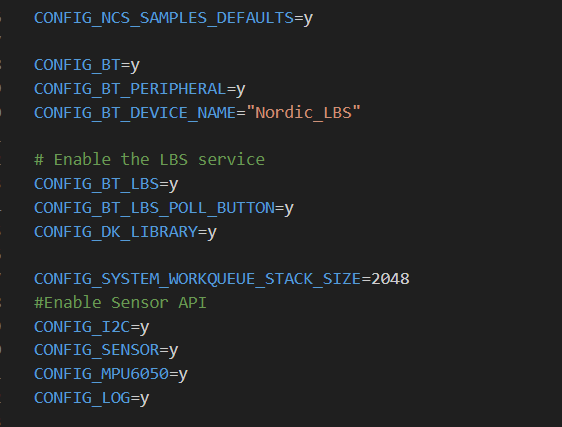 No , I have add already.
No , I have add already.