
Hi guys,
I've been working with the NRF52832 in the past days and I'm having issues with the GPIOTE interrupts.
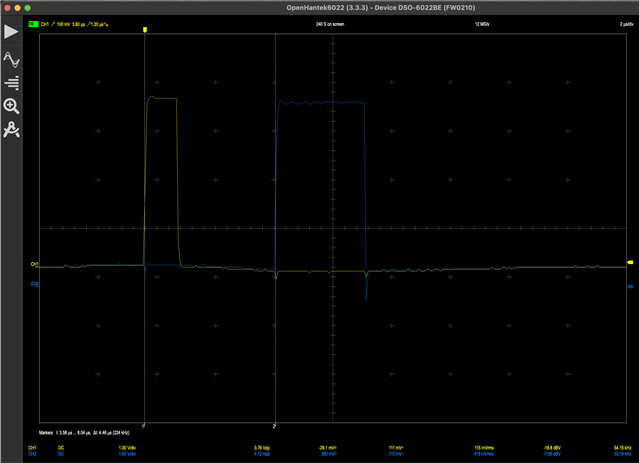
It seems that there a latency of around 30us until the interrupt handler is called?
To give a bit of context I'm working with the TDC1000 which is an Ultrasonic Sensing Analog Front End that will return the distance by triggering an interrupt on the stop pin. To calculate the distance I need to have the start interrupt time and use it to subtract with the stop interrupt time. Since it's an 1MHz transducer, it means that 10us is equal to 7mm (10 * 1450 / 2). That's why I really need the interrupts to work with zero latency. In theory if the latency is always the same it should still work since it will compensate when subtracting, but I'm afraid that is not the case. To measure the time I'm using a timer running at 16MHz which should give me enough accuracy (1/16).
The way I've code the interrupts was:
#define TIMER_INST_IDX 0
static const struct gpio_dt_spec tdc1000_en = GPIO_DT_SPEC_GET_OR(DT_ALIAS(tdc1000_en), gpios, {0});
static const struct gpio_dt_spec tdc1000_rst = GPIO_DT_SPEC_GET_OR(DT_ALIAS(tdc1000_rst), gpios, {0});
static const struct gpio_dt_spec tdc1000_trigger = GPIO_DT_SPEC_GET_OR(DT_ALIAS(tdc1000_trigger), gpios, {0});
static const struct gpio_dt_spec tdc1000_chsel = GPIO_DT_SPEC_GET_OR(DT_ALIAS(tdc1000_chsel), gpios, {0});
static const struct gpio_dt_spec tdc1000_start = GPIO_DT_SPEC_GET_OR(DT_ALIAS(tdc1000_start), gpios, {0});
static const struct gpio_dt_spec tdc1000_stop = GPIO_DT_SPEC_GET_OR(DT_ALIAS(tdc1000_stop), gpios, {0});
static const struct gpio_dt_spec tdc1000_errb = GPIO_DT_SPEC_GET_OR(DT_ALIAS(tdc1000_errb), gpios, {0});
static const struct gpio_dt_spec *required_gpios_ins[3] = {&tdc1000_start, &tdc1000_stop, &tdc1000_errb};
static const gpio_flags_t gpio_ins_flags[3] = {GPIO_INPUT | GPIO_PULL_DOWN, GPIO_INPUT | GPIO_PULL_DOWN, GPIO_INPUT};
static const gpio_flags_t gpio_ins_int_flags[3] = {GPIO_INT_EDGE_TO_ACTIVE, GPIO_INT_EDGE_TO_ACTIVE, GPIO_INT_EDGE_TO_INACTIVE};
K_MSGQ_DEFINE(gpio_interrupt_q, sizeof(gpio_int_context_t), INT_QUEUE_SIZE, 4);
static nrfx_timer_t tof_timer_inst = NRFX_TIMER_INSTANCE(TIMER_INST_IDX);
uint8_t tank_reader_init(void)
{
int err;
for (uint8_t i = 0; i < sizeof(required_gpios_ins) / sizeof(struct gpio_dt_spec *); i++)
{
if (!gpio_is_ready_dt(required_gpios_ins[i]))
{
LOG_ERR("One of the required GPIO's port is not ready.\n");
return EXIT_FAILURE;
}
err = gpio_pin_configure_dt(required_gpios_ins[i], gpio_ins_flags[i]);
if (err != 0)
{
LOG_ERR("Error %d: failed to configure %s pin %d",
err, required_gpios_ins[i]->port->name, required_gpios_ins[i]->pin);
return EXIT_FAILURE;
}
err = gpio_pin_interrupt_configure_dt(required_gpios_ins[i], gpio_ins_int_flags[i]);
if (err != 0)
{
LOG_ERR("Error %d: failed to configure interrupt on %s pin %d",
err, required_gpios_ins[i]->port->name, required_gpios_ins[i]->pin);
return EXIT_FAILURE;
}
gpio_init_callback(gpio_cb_data[i], gpio_interrupt_handler, BIT(required_gpios_ins[i]->pin));
gpio_add_callback(required_gpios_ins[i]->port, gpio_cb_data[i]);
}
// Configure timer that will later be used for measuring the ToF
nrfx_err_t status;
uint32_t base_frequency = NRF_TIMER_BASE_FREQUENCY_GET(tof_timer_inst.p_reg);
LOG_INF("Base frequency: %u", base_frequency); // 16000000
nrfx_timer_config_t config = NRFX_TIMER_DEFAULT_CONFIG(base_frequency);
config.mode = NRF_TIMER_MODE_TIMER;
config.bit_width = TIMER_BITMODE_BITMODE_32Bit; // approx. 4.4 min
config.p_context = &tof_timer_inst;
status = nrfx_timer_init(&tof_timer_inst, &config, NULL);
if (status != NRFX_SUCCESS)
{
LOG_ERR("Error while configuring timer for ToF reading!");
return EXIT_FAILURE;
}
NVIC_SetPriority(GPIOTE_IRQn, IRQ_PRIO_LOWEST);
NVIC_SetPriority(TIMER0_IRQn, IRQ_PRIO_LOWEST);
return EXIT_SUCCESS;
}
uint8_t tank_reader_get_level() {
// flush
k_msgq_purge(&gpio_interrupt_q);
LOG_INF("Triggering TDC");
// enables 16Mhz timer ()
nrfx_timer_enable(&tof_timer_inst);
if (!nrfx_timer_is_enabled(&tof_timer_inst))
{
LOG_ERR("Timer is not working. Unable to calculate ToF!");
return EXIT_FAILURE;
}
nrfx_timer_clear(&tof_timer_inst); // reset
uint32_t triggered_timer_value = nrfx_timer_capture(&tof_timer_inst, NRF_TIMER_CC_CHANNEL0);
tank_reader_drive_trigger_tdc(1);
tank_reader_drive_trigger_tdc(0);
// wait for trigger start
if ((k_msgq_get(&gpio_interrupt_q, &interrupt_context, K_MSEC(1)) == 0) && (interrupt_context.pin == TDC1000_START_PIN))
{
uint32_t timeout_count_start = (uint32_t)k_uptime_get();
uint32_t elapsed = 0;
LOG_INF("TX pulses transmitted after: %.2f usec.", (double)((interrupt_context.cycle_count - triggered_timer_value) * 0.0625f));
uint32_t stop_cycle_count[INT_QUEUE_SIZE] = {0};
uint32_t start_cycle_count = interrupt_context.cycle_count;
uint8_t stop_cycles_detected = 0;
// wait for reply
while ((timeout > elapsed) && (k_msgq_get(&gpio_interrupt_q, &interrupt_context, K_MSEC(timeout - elapsed)) == 0))
{
// update elapsed for timeout calculation
elapsed = (uint32_t)k_uptime_get() - timeout_count_start;
if (interrupt_context.pin == TDC1000_ERRB_PIN)
{
LOG_ERR("ERRB pin triggered! Timeout...");
break;
}
else if (interrupt_context.pin == TDC1000_STOP_PIN)
{
stop_cycle_count[stop_cycles_detected++] = interrupt_context.cycle_count;
}
}
// stop the timer now
nrfx_timer_disable(&tof_timer_inst);
}
}
static void gpio_interrupt_handler(const struct device *dev, struct gpio_callback *cb, uint32_t pins)
{
static gpio_int_context_t int_context = {0};
int_context.cycle_count = nrfx_timer_capture(&tof_timer_inst, NRF_TIMER_CC_CHANNEL0);
if (cb == &tdc1000_start_cb_data)
{
int_context.pin = TDC1000_START_PIN;
// LOG_INF("Interrupt from START pin at %" PRIu32 "\n", int_context.cycle_count);
}
else if (cb == &tdc1000_stop_cb_data)
{
int_context.pin = TDC1000_STOP_PIN;
// LOG_INF("Interrupt from STOP pin at %" PRIu32 "\n", int_context.cycle_count);
}
else if (cb == &tdc1000_errb_cb_data)
{
int_context.pin = TDC1000_ERRB_PIN;
// LOG_INF("Interrupt from ERRB pin at %" PRIu32 "\n", int_context.cycle_count);
}
else
{
// Nothing to do
return;
}
// add to the queue
k_msgq_put(&gpio_interrupt_q, &int_context, K_NO_WAIT);
}
CONFIG_SENSOR=y CONFIG_LIS2DH=y CONFIG_I2C=y CONFIG_GPIO=y CONFIG_LOG=y CONFIG_USE_SEGGER_RTT=y CONFIG_CONSOLE=y CONFIG_RTT_CONSOLE=y CONFIG_UART_CONSOLE=n CONFIG_SERIAL=y CONFIG_UART_INTERRUPT_DRIVEN=y CONFIG_ADC=y CONFIG_MCP970X=y CONFIG_BT=y CONFIG_PWM=y CONFIG_CLOCK_CONTROL=y CONFIG_SPI=y CONFIG_WDT_LOG_LEVEL_INF=n CONFIG_WATCHDOG=n CONFIG_WDT_DISABLE_AT_BOOT=n CONFIG_REQUIRES_FLOAT_PRINTF=y CONFIG_BT_DEVICE_NAME="Beacon" CONFIG_MAIN_THREAD_PRIORITY=10 CONFIG_LIS2DH_TRIGGER_OWN_THREAD=n CONFIG_LIS2DH_ACCEL_RANGE_2G=y CONFIG_LIS2DH_OPER_MODE_LOW_POWER=y CONFIG_LIS2DH_ODR_1=y CONFIG_NRFX_TIMER0=y CONFIG_ZERO_LATENCY_IRQS=y
&gpiote0 {
interrupts = <6 0>;
};
Calling NVIC_SetPriority seems to have no effect.

