Hello team,
We are using nrf52dk with nrf52832 by vs code nrf connect sdk extension.
I have add zephyr led blinky application and flash it on the board and it's working fine.
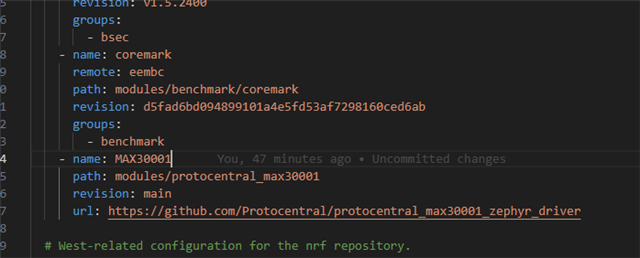
Now I need to add the driver code of Max30001 git hub link
https://github.com/Protocentral/protocentral_max30001_zephyr_driver
Can anyone please help me like how to add this driver code and get the ecg value by SPI
Note: I am new on this zephyr OS, so please if possible guide me step by step solution if possible. It will be very helpful.