Hi,
Is there a way to make the main thread to execute after any interrupt?
For now, I have something like this (ncs 2.7.0):
in main thread :
for(;;)
{
// execute code
k_sleep(K_FOREVER);
}
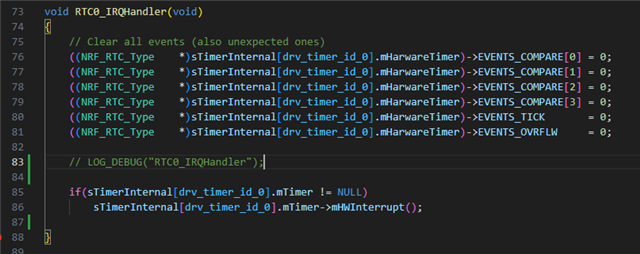
In each IRQ handlers (gpio, timers...)
irq_handler
{
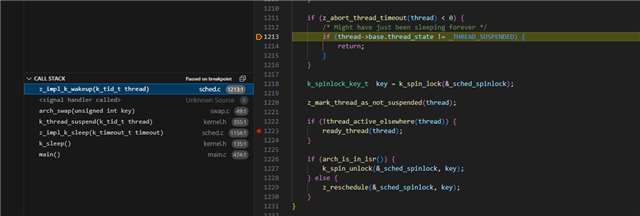
k_wakeup(mainThreadID);
}
I think that this is error prone, as I can't be sure to fill all handlers, and it could be hard to maintain. Also, what about the native handler I didn't overwrite?
Is there a way to have a general irq_handler or a hook that could be executed on ANY interrupt, in addition to other regular handlers?
The whole point here is to replace the WFE() instruction I had in a bare metal application.
Thank you for your help