
Dear Support Team,
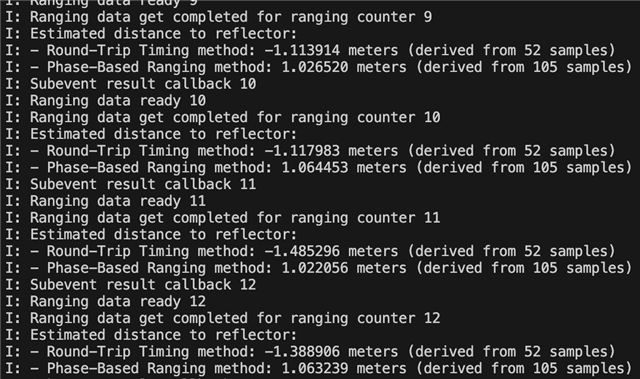
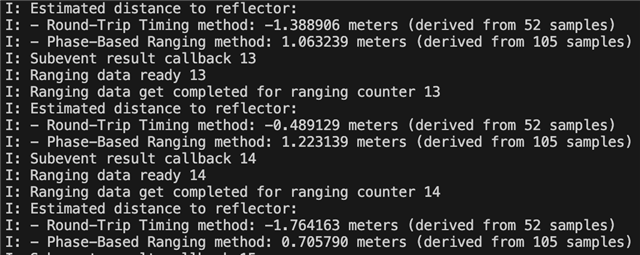
I am currently working with two nRF54L15 DK boards placed approximately 50 cm apart and stationary. I am using the channel_sounding_ras_ example with SDK v2.9.1 to evaluate channel sounding precision.
However, I am encountering significant variations in the measurements, even though the boards remain static. Additionally, I am unable to achieve a precision better than half a meter.
To improve accuracy, I have adjusted several parameters, including:
abstracts from main.c (initiator)
line 437 and 438
.rtt_type = BT_CONN_LE_CS_RTT_TYPE_128_BIT_RANDOM, .cs_sync_phy = BT_CONN_LE_CS_SYNC_2M_PHY,
line 476 and 477
.snr_control_initiator = BT_LE_CS_INITIATOR_SNR_CONTROL_30dB, .snr_control_reflector = BT_LE_CS_REFLECTOR_SNR_CONTROL_30dB,
Despite these modifications, the precision remains poor, and I occasionally observe large fluctuations in the results.
Could you provide guidance on how to improve the accuracy and stability of the channel sounding measurements? Are there additional parameters I should adjust, or known limitations with this setup?
Thank you in advance for your support.
Best regards,
Maxime

