
Hi all,
I've been developing a BLE application on my laptop to communicate with the 52840. I manage to understand how to create and run a BLE connection through the really nice tutorial that has been posted a couple of years ago on youtube.
https://www.youtube.com/watch?v=hY_tDext6zA
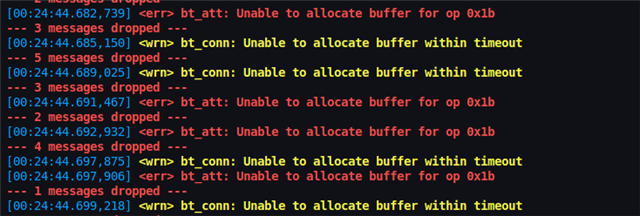
Maybe this is nothing or maybe I'm using the system wrong, but I created a specific characteristic for stream data. Whenever I activate it, my terminal gets flooded with the messages in the attached pic.
My question is, are those only related to the Loggin framework and I should not be (at a certain level) worried? is this an issue about streaming too fast? If the latter, maybe this BLE is not indicated for data streams?
thank you all
[EDIT]
some extra info that may be of use.
I am streaming data out from a worker that runs at 1ms and sends a single uint16 packet over a dedicated characteristic. This error occurs when I enable such stream. Writing/reading single characteristics with manual inputs (using the evk buttons) does not give any issues. Ideally I'd like to stream an array of 16 uint16 elements.
This is my current configuration file
CONFIG_GPIO=y CONFIG_SPI=y CONFIG_FPU=y CONFIG_NEWLIB_LIBC=y CONFIG_CBPRINTF_FP_SUPPORT=y # Set CONFIG_NEWLIB_LIBC_FLOAT_PRINTF if printf should be able to print float CONFIG_NEWLIB_LIBC_FLOAT_PRINTF=y # Enable DK LED and Buttons library CONFIG_DK_LIBRARY=y # Configure logger CONFIG_LOG=y CONFIG_LOG_MODE_MINIMAL=n CONFIG_USE_SEGGER_RTT=n CONFIG_LOG_BACKEND_RTT=n CONFIG_LOG_BACKEND_UART=y CONFIG_LOG_DEFAULT_LEVEL=3 CONFIG_LOG_PRINTK=y CONFIG_LOG_MODE_DEFERRED=y # Configure Bluetooth CONFIG_BT=y CONFIG_BT_PERIPHERAL=y CONFIG_BT_DEVICE_NAME="XYZ" CONFIG_BT_DEVICE_APPEARANCE=0 CONFIG_BT_MAX_CONN=1 CONFIG_BT_LL_SOFTDEVICE=y CONFIG_ASSERT=y

