Hi,
I want to produce a pulse with 4 seconds length from p0.25, but i am failed.
#include <zephyr/sys/printk.h>
#include <nrfx_pwm.h>
#include <hal/nrf_gpio.h>
static nrfx_pwm_t m_pwm = NRFX_PWM_INSTANCE(0);
static volatile uint8_t current_seq = 0;
#define motor_pwr_ctrl NRF_GPIO_PIN_MAP(0, 25)
// PWM sequence
static nrf_pwm_values_individual_t seq_data[4] = {
{.channel_0 = 250}, // 20% duty (250/1250)
{.channel_0 = 625}, // 50% duty
{.channel_0 = 875}, // 70% duty
{.channel_0 = 1125} // 90% duty
};
static nrf_pwm_sequence_t sequences[4] = {
{ // sequence0
.values.p_individual = &seq_data[0],
.length = NRF_PWM_VALUES_LENGTH(seq_data[0]),
.repeats = 0,
.end_delay = 0
},
{ // sequence1
.values.p_individual = &seq_data[1],
.length = NRF_PWM_VALUES_LENGTH(seq_data[1]),
.repeats = 0,
.end_delay = 0
},
{ // sequence2
.values.p_individual = &seq_data[2],
.length = NRF_PWM_VALUES_LENGTH(seq_data[2]),
.repeats = 0,
.end_delay = 0
},
{ // sequence3
.values.p_individual = &seq_data[3],
.length = NRF_PWM_VALUES_LENGTH(seq_data[3]),
.repeats = 0,
.end_delay = 0
}
};
// PWM handler
static void pwm_handler(nrfx_pwm_evt_type_t event_type, void* pContext)
{
if (event_type == NRFX_PWM_EVT_FINISHED) {
if (current_seq < 4) {
// play next sequence
current_seq++;
nrfx_pwm_simple_playback(&m_pwm, &sequences[current_seq], 100, NRFX_PWM_FLAG_STOP); //repeat 100 times =1 second
printk("pwm_handler,current_seq=%d.\n", current_seq);
} else {
//stop and relese pwm
nrfx_pwm_stop(&m_pwm, false);
nrfx_pwm_uninit(&m_pwm);
printk("nrfx_pwm_uninit.\n");
}
}
}
// PWM initial
void init_pwm(void)
{
nrfx_pwm_config_t config = {
.output_pins = {
motor_pwr_ctrl, // channel 0
0xff, //not used
0xff,
0xff
},
.irq_priority = NRFX_PWM_DEFAULT_CONFIG_IRQ_PRIORITY,
.base_clock = NRF_PWM_CLK_125kHz,
.count_mode = NRF_PWM_MODE_UP,
.top_value = 1250, // 10ms (1250/125kHz)
.load_mode = NRF_PWM_LOAD_INDIVIDUAL,
.step_mode = NRF_PWM_STEP_AUTO
};
nrfx_pwm_init(&m_pwm, &config, (nrfx_pwm_handler_t)pwm_handler, NULL);
current_seq = 0;
//play the sequence0
nrfx_pwm_simple_playback(&m_pwm, &sequences[0], 100, NRFX_PWM_FLAG_STOP);//repeat 100 times =1 second
}
void PWM_Go(void)
{
#if defined(__ZEPHYR__)
IRQ_CONNECT(NRFX_IRQ_NUMBER_GET(NRF_PWM0), IRQ_PRIO_LOWEST, pwm_handler, 0, 0);
#endif
init_pwm();
}
void main(void)
{
... ...
PWM_Go();
while (1) {
k_sleep(K_FOREVER);
}
}
prj.conf:
CONFIG_NRFX_PWM0=y
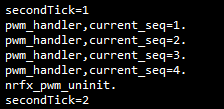
Next is the actual pulse: