Hi
I am currently working with my project with 52840 and i am using sdk v3.0.1 & toolchain v3.0.0 to develope.
I am learning how to use DFU over UART from the application in Devacademy l9/e2 , it works fine using the example , after that i try it on my own project but because my project use one uart only , so UART DFU and my APP use the same uart(UART0) , and i added two config
CONFIG_SHELL=y
CONFIG_MCUMGR_TRANSPORT_SHELL=y
also init uart0 in my application
void uart0_init(void)
{
uint32_t err = device_is_ready( dev_uart0 );
if( err != true )
{
printk("\nUART_init_err = %d\n", err);
}
uart_irq_callback_user_data_set(dev_uart0,uart0_irq_callback, NULL )
uart_irq_rx_enable( dev_uart0 );
}
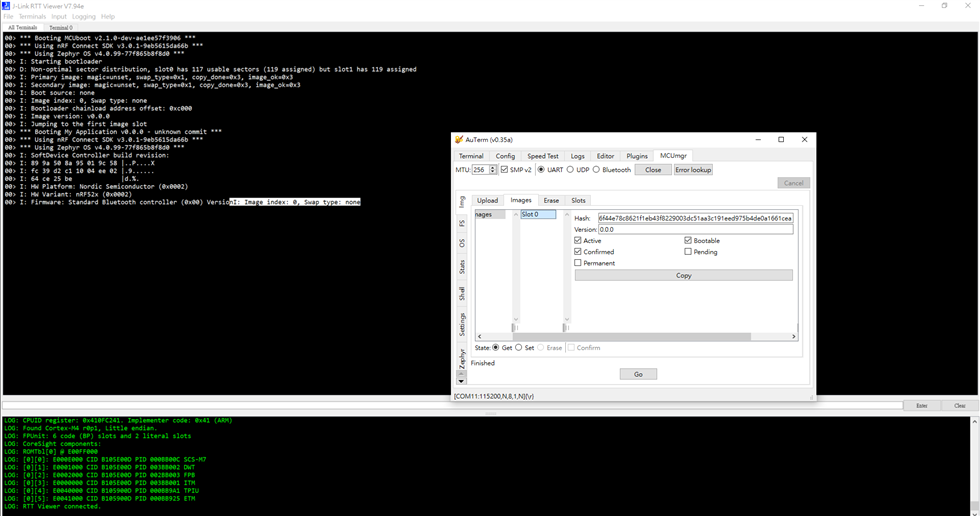
i use Auterm(v0.35a) to Get image , Auterm data keep running into my uart0_irq_callback , not into MCUMGR shell
is there any way to let my application uart and uart dfu use the same uart and the same time without deinit the uart ? Thanks!