Certainly! Here’s a clear, natural English version of your email:
Dear Specialist,
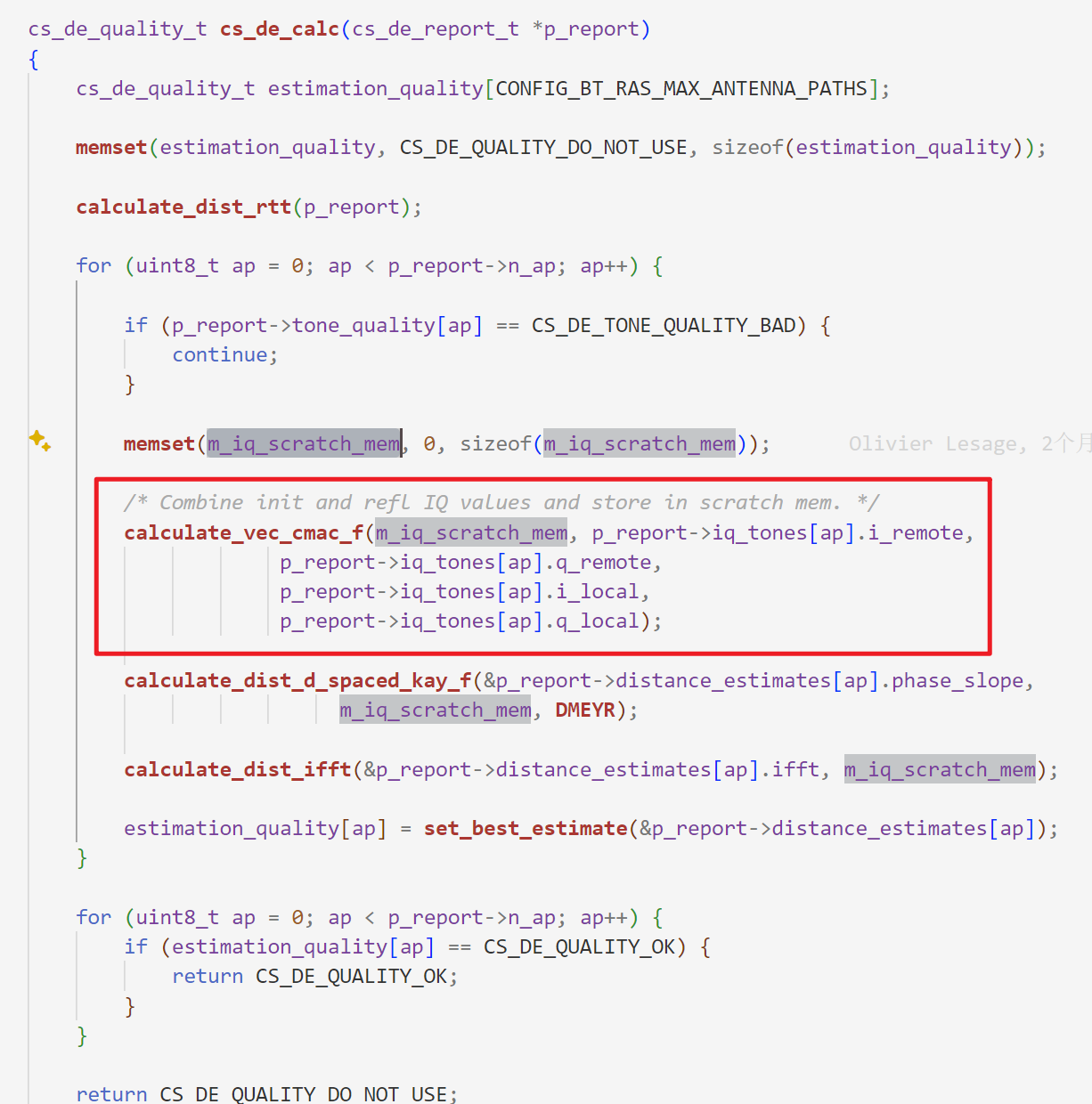
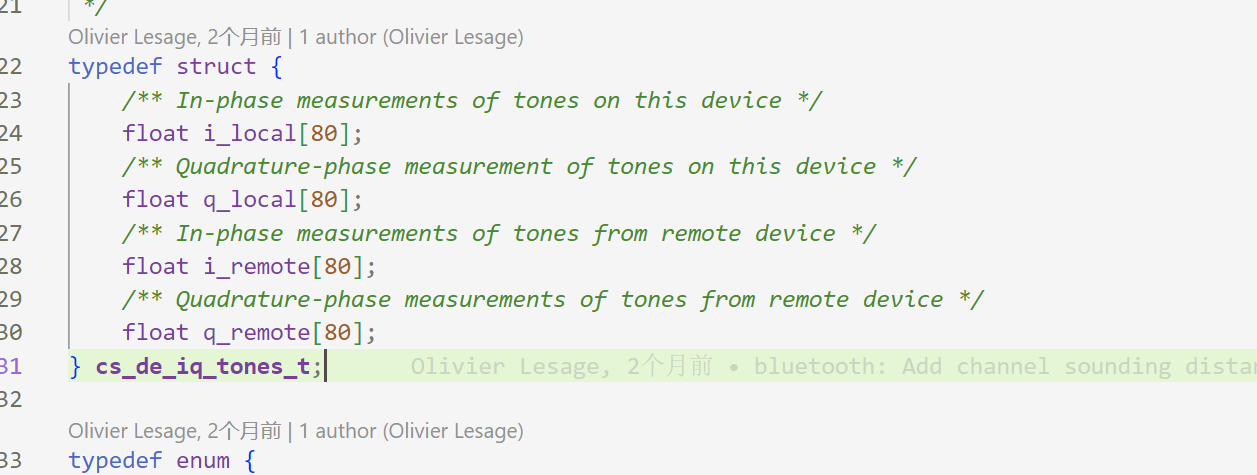
I would like to better understand the two variables used in the SDK for calculating the phase of each channel: the local and remote (or, in version 2.9.0, the peer) I/Q values. Specifically, I am interested in how these values are obtained—are they averages over a series of measurements, or do they have some other physical significance?
-
What do “local” and “remote” represent?
Do they refer to the phase values measured by each device for the signals transmitted by the other? According to the description in the Bluetooth Channel Sounding technical overview, the reflector only reflects the signal and does not measure it—it simply bounces the transmitted signal back to the initiator. Based on this, it seems that “local” and “remote” might refer to the local oscillator of the transmitter and the signal eventually received by the transmitter, with their difference representing the final phase change.However, in the BLE 6 Core Specification, for multi-antenna measurements, the transmitter needs to send signals sequentially from multiple antennas, and only then does the reflector return each signal. This process appears to be more than just simple reflection; it suggests that the reflector is actively involved, rather than merely relaying the signal without phase measurement. If the reflector only acts as a relay without participating in phase measurement, this should happen at the hardware level, and it seems unlikely that it could wait for all transmissions to finish before retransmitting each one.
-
If both devices are measuring the phase bidirectionally, why is there only one value reported for local and remote per channel in each subevent?
In BLE AoA, estimating the phase of a signal requires a series of phase values sampled continuously from the CTE portion of the packet, which are then used to estimate the overall phase of the packet. In Channel Sounding, is it also the case that a series of phase values are sampled continuously from the mode-2 tone signal, and synchronization between the devices ensures that the sampling time aligns within each packet? Is the final phase value reported the average of the differences between a series of local and remote measurements?
Thank you for your help!
Best regards,
Cheng