Title
nRF5340 DK × 2 + MCP2515/TJA1050 – can_start() = -5 (CANCTRL/CANSTAT = 0xFF). What am I missing?
Hi everyone,
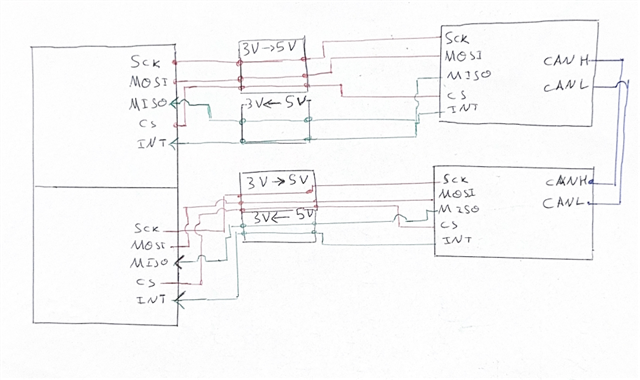
I’m trying to bring-up a very small CAN bus test bench built with two Nordic nRF5340 DKs (application core only).
Each DK is wired to the usual “all-in-one” MCP2515 + TJA1050 8 MHz breakout board, through a 3 V 5 V level-shifter.
5 V level-shifter.
Both DKs share CAN H/L and 120 Ω termination, so the setup is basically:
nRF5340 DK #1 <--SPI3--> MCP2515 board <--TJA1050--> CAN bus
nRF5340 DK #2 <--SPI3--> MCP2515 board <--TJA1050--> CAN bus
I’m on Zephyr 4.1.99 (built from current main), using the in-tree MCP2515 driver.
Symptoms
-
can_start(can_dev)returns -5 (-EIO) every time. -
When I manually read the registers right after a software reset I get
CANCTRL = 0xFF CANSTAT = 0xFF (sometimes 0x00 after I keep CS low)which looks like no response from the MCP2515 at all.
-
With an oscilloscope I can see SCK ≈ 1 MHz and MOSI activity,
but CS stays low (driver-controlled) and MISO never toggles.
What I already tried
-
Verified 5 V on MCP2515 VDD and 8 MHz crystal is running.
-
Forced a software reset sequence (
0xC0), small delay, then raw SPI read ofCANSTAT→ still0xFF/0x00. -
Added explicit bit-timing for the 8 MHz crystal (250 kbit/s) before
can_start()– no change. -
Toggling CS manually in the application proves the pin & level-shifter work; as soon as the driver owns CS it sits low.
-
Moving the module to a spare STM32 board shows it is alive, so the hardware itself is OK.
Minimal files
prj.conf
CONFIG_GPIO=y
CONFIG_PINCTRL=y
CONFIG_SPI=y
CONFIG_SPI_ASYNC=y
CONFIG_CAN=y
CONFIG_CAN_MCP2515=y
CONFIG_PRINTK=y
CONFIG_MAIN_STACK_SIZE=2048
Overlay (nrf5340dk_nrf5340_cpuapp.overlay)
/* SPI3 on DK (P0.04 SCK, P0.05 MOSI, P0.06 MISO, P0.25 CS) */
&pinctrl {
spi3_default: spi3_default {
group1 {
psels = <
NRF_PSEL(SPIM_SCK, 0, 4)
NRF_PSEL(SPIM_MOSI, 0, 5)
NRF_PSEL(SPIM_MISO, 0, 6)
>;
};
};
spi3_sleep: spi3_sleep {
group1 {
psels = <
NRF_PSEL(SPIM_SCK, 0, 4)
NRF_PSEL(SPIM_MOSI, 0, 5)
NRF_PSEL(SPIM_MISO, 0, 6)
>;
low-power-enable;
};
};
};
&spi3 {
status = "okay";
pinctrl-0 = <&spi3_default>;
pinctrl-1 = <&spi3_sleep>;
pinctrl-names = "default", "sleep";
cs-gpios = <&gpio0 25 GPIO_ACTIVE_LOW>;
mcp2515: can0@0 {
compatible = "microchip,mcp2515";
reg = <0>;
spi-max-frequency = <1000000>;
osc-freq = <8000000>;
bus-speed = <250000>; /* 250 kbit/s */
int-gpios = <&gpio1 15 GPIO_ACTIVE_LOW>;
status = "okay";
label = "CAN_0";
};
};
/* disable unused SPIM to silence pinctrl warnings */
&spi0 { status = "disabled"; };
&spi1 { status = "disabled"; };
&spi2 { status = "disabled"; };
&spi4 { status = "disabled"; };
Excerpt of the test main.c
static const struct device *const can_dev = DEVICE_DT_GET(DT_NODELABEL(mcp2515));
static const struct spi_dt_spec mcp_spi =
SPI_DT_SPEC_GET(DT_NODELABEL(mcp2515),
SPI_WORD_SET(8) | SPI_OP_MODE_MASTER | SPI_TRANSFER_MSB,
0);
void main(void)
{
/* give the 8 MHz crystal some time */
k_sleep(K_MSEC(5));
/* --- software reset --- */
uint8_t rst = 0xC0;
struct spi_buf b = { &rst, 1 };
struct spi_buf_set s = { &b, 1 };
spi_write_dt(&mcp_spi, &s);
k_sleep(K_MSEC(2));
/* quick CANSTAT read */
uint8_t cmd[3] = { 0x03, 0x0E, 0x00 }; /* READ 0x0E */
uint8_t rx[3] = { 0 };
struct spi_buf tx = { cmd, sizeof(cmd) };
struct spi_buf rxbuf = { rx, sizeof(rx) };
struct spi_buf_set TX = { &tx, 1 }, RX = { &rxbuf, 1 };
spi_transceive_dt(&mcp_spi, &TX, &RX);
printk("CANCTRL 0x%02X CANSTAT 0x%02X\n", rx[1], rx[2]); /* both 0xFF */
struct can_timing t = {
.prescaler = 1,
.sjw = 1,
.prop_seg = 5,
.phase_seg1 = 5,
.phase_seg2 = 5,
};
can_set_timing(can_dev, &t);
int ret = can_start(can_dev); /* always ret = -5 */
printk("can_start() -> %d\n", ret);
}
Question
What else should I check?
-
Is there something obvious in my overlay / pinctrl that would keep CS low?
-
Do I have to patch the MCP2515 driver for an 8 MHz oscillator (BRP tables)?
-
Any clue why the device just returns
0xFFon every read (→ tri-stated MISO)?
I’d be grateful for any hint
Thanks!