
Dear Nordic Specialist,
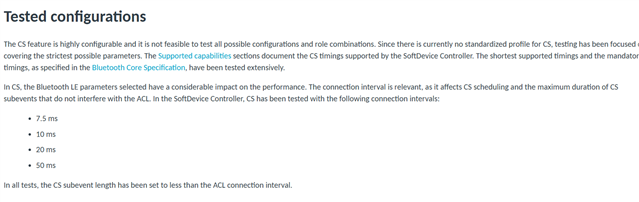
I am currently testing the minimum connection interval at which BLE Channel Sounding can operate reliably. Specifically, I would like to achieve a connection interval of 50ms or less on my nRF54L15DK. According to Nordic’s official documentation, connection intervals of 50ms or shorter are mentioned as tested and supported.
However, when using the Nordic Connect SDK Sample: Bluetooth: Channel Sounding Initiator with Ranging Requestor, I have found it very difficult to achieve such a fast connection interval. In practice, the connection interval cannot be set lower than 250ms; otherwise, I encounter "overwritten" callbacks.
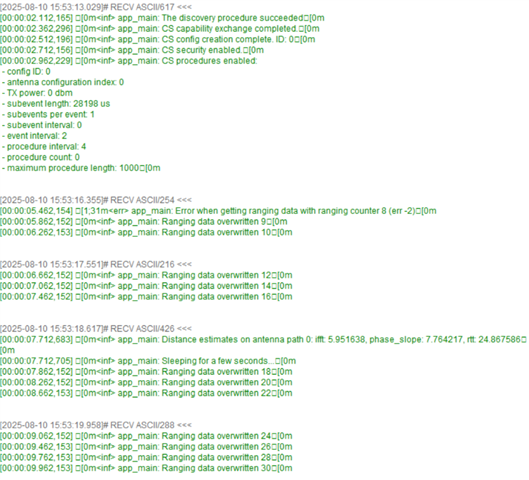
From my tests, the minimum stable interval without overwritten errors is 300ms (interval = 6). This is sufficient for data storage to flash in the sample application.
At this point, I would like to know if there is any set of feasible configuration parameters that would allow for a 50ms, or at least faster than 250ms, connection interval.
Additionally, I have noticed that in the latest commits on GitHub, the connection interval also appears to be limited to no less than 200–250ms (interval = 4 or 5).
bluetooth: samples: increase procedure interval in RAS RREQ sample · nrfconnect/sdk-nrf@2f8cf5c
I have also tried reducing the number of enabled channels and decreasing the number of mode-0 steps, which only slightly reduces the length of each subevent. With the channel map repetition already set to 1, these changes have minimal effect—the subevent length still remains around 20ms.
Would it be necessary to disable certain features in order to achieve shorter intervals? Reduce the number of channels or num of mode-0 steps only reduce 100us per step
Thank you very much for your attention and support. I look forward to your guidance.
Best regards,
Cheng


