
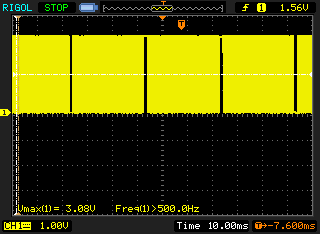
When setting up a 1Mhz square wave using NRF_PWM on the NRF52 or GPIOTE on the NRF51 while BLE is advertising, the PWM stops when the radio is active. The problem doesn't happen when the frequency is below 6khz. No PWM interrupt is enabled. Is this an unavoidable limitation with high PWM frequencies?


