
Now we have bound the corresponding pins in the device tree, and there is no pin multiplexing except for LED and BUTTON. However, now as long as we configure SPI in the main.c function, such as:const struct device *spi3 = DEVICE_DT_GET(DT_NODELABEL(spi3));const struct device *spi4 = DEVICE_DT_GET(DT_NODELABEL(spi4));
When debugging the program, it will hang after entering configure_gpio(). I don't know why this happens. Here is my main.c code and the pin configuration in the device tree. Please help me.
2112.app.overlay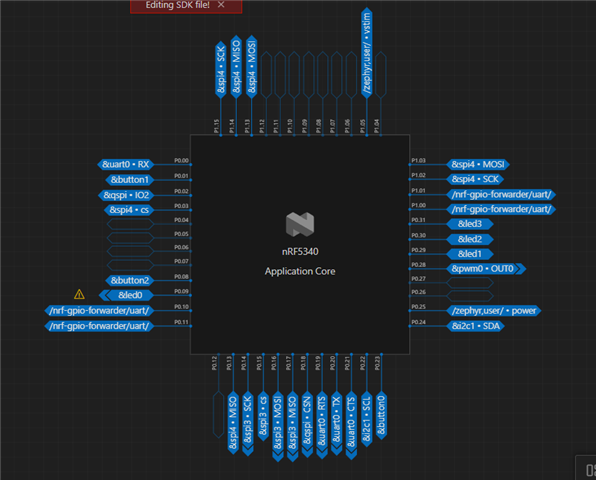
/*
* Copyright (c) 2018 Nordic Semiconductor ASA
*
* SPDX-License-Identifier: LicenseRef-Nordic-5-Clause
*/
/** @file
* @brief Nordic UART Bridge Service (NUS) sample
*/
#include <uart_async_adapter.h>
#include <zephyr/types.h>
#include <zephyr/kernel.h>
#include <zephyr/drivers/uart.h>
#include <zephyr/usb/usb_device.h>
#include <zephyr/device.h>
#include <zephyr/devicetree.h>
#include <soc.h>
#include <zephyr/bluetooth/bluetooth.h>
#include <zephyr/bluetooth/uuid.h>
#include <zephyr/bluetooth/gatt.h>
#include <zephyr/bluetooth/hci.h>
#include <bluetooth/services/nus.h>
#include <dk_buttons_and_leds.h>
#include <zephyr/settings/settings.h>
#include <stdio.h>
#include <string.h>
#include <zephyr/logging/log.h>
#include <zephyr/drivers/gpio.h>
#include<zephyr/sys/printk.h>
#include<zephyr/drivers/clock_control.h>
#include<zephyr/drivers/clock_control/nrf_clock_control.h>
#include <zephyr/drivers/i2c.h>
#include <zephyr/devicetree.h>
#include <zephyr/drivers/regulator.h>
#include <nrfx.h>
#include<zephyr/drivers/spi.h>
#define LOG_MODULE_NAME peripheral_uart
LOG_MODULE_REGISTER(LOG_MODULE_NAME);
#define STACKSIZE CONFIG_BT_NUS_THREAD_STACK_SIZE
#define PRIORITY 7
#define DEVICE_NAME CONFIG_BT_DEVICE_NAME
#define DEVICE_NAME_LEN (sizeof(DEVICE_NAME) - 1)
#define RUN_STATUS_LED DK_LED1
#define RUN_LED_BLINK_INTERVAL 1000
#define CON_STATUS_LED DK_LED2
#define KEY_PASSKEY_ACCEPT DK_BTN1_MSK
#define KEY_PASSKEY_REJECT DK_BTN2_MSK
#define UART_BUF_SIZE CONFIG_BT_NUS_UART_BUFFER_SIZE
#define UART_WAIT_FOR_BUF_DELAY K_MSEC(50)
#define UART_WAIT_FOR_RX CONFIG_BT_NUS_UART_RX_WAIT_TIME
#define RHS_CHIP_ID 32 // ROM reg 255
// 寄存器地址
#define REG_ADC_BIAS 0
#define REG_DSP_CTRL 1
#define REG_ZCHECK_CTRL 2
#define REG_ZCHECK_DAC 3
#define REG_RH1_SEL 4
#define REG_RH2_SEL 5
#define REG_RL_A_SEL 6
#define REG_RL_B_SEL 7
#define REG_AC_AMP_POWER 8
#define REG_FAST_SETTLE 10
#define REG_AMP_FL_SEL 12
#define REG_STIM_STEP 34
#define REG_STIM_BIAS 35
#define REG_CL_RECOV_V 36
#define REG_CL_RECOV_I 37
#define REG_DC_AMP_POWER 38
#define REG_COMP_MON 40
#define REG_STIM_EN_A 42 // 刺激使能 A
#define REG_STIM_EN_B 43 // 刺激使能 B
#define REG_STIM_ON 44
#define REG_STIM_POL 45
#define REG_CHARGE_REC_SW 46
#define REG_CL_RECOV_EN 48
#define REG_FAULT_CURR 50
// 初始化值 (手册 page 45, 30 kS/s, 7.5 kHz fH, 5 Hz fL)
#define INIT_ADC_BIAS 0x00C5 // MUX/ADC bias for 480 kS/s
#define INIT_DSP_CTRL 0x051A // DSP 4.665 Hz, absmode=0, twoscomp=0
#define INIT_RH1_SEL 0x0016
#define INIT_RH2_SEL 0x0017
#define INIT_RL_A_SEL 0x00A8 // 5 Hz
#define INIT_RL_B_SEL 0x000A // 1 kHz alternate
#define INIT_AC_POWER 0xFFFF
#define INIT_DC_POWER 0xFFFF // 重要:全开,避免 bug
#define INIT_FAST_SETTLE 0x0000
#define INIT_AMP_FL_SEL 0xFFFF // 全用 A (5 Hz)
#define INIT_STIM_STEP 0x00E2 // 1 uA/step
#define INIT_STIM_BIAS 0x00AA
#define INIT_CL_V 0x0080 // 0V
#define INIT_CL_I 0x4F00 // 1 nA
#define INIT_STIM_EN_A 0x0000 // 禁用刺激
#define INIT_STIM_EN_B 0x0000
#define INIT_STIM_ON 0x0000
#define INIT_STIM_POL 0x0000 // 负极性
#define INIT_CHARGE_REC_SW 0x0000
#define INIT_CL_EN 0x0000
static struct rhs2116_dev rhs1;
static struct rhs2116_dev rhs2;
// SPI 配置
// #define SPI_FREQ DT_PROP(DT_NODELABEL(spi3), spi_max_frequency) // 10 MHz
// #define SPI_OP SPI_WORD_SET(8) | SPI_OP_MODE_MASTER | SPI_MODE_CPOL0 | SPI_MODE_CPHA0
#define SPI_FREQ (10000000U) // 10 MHz
#define SPI_OP (SPI_WORD_SET(8) | SPI_OP_MODE_MASTER) // Mode 0: CPOL=0, CPHA=0
static uint8_t ble_ADC[250];
static uint8_t ble_Tx[250];
//static uint8_t ble_Tx1[250];
static uint16_t bag=0;
static uint16_t LASTbag=0;
//static int8_t counter=0;
static struct k_timer adc_timer; // 定时器实例
static void adc_timer_handler(struct k_timer *timer_id); // 前向声明
static struct k_work adc_work ;
#define LED0_NODE DT_ALIAS(led0)
static const struct gpio_dt_spec led = GPIO_DT_SPEC_GET(DT_ALIAS(led0), gpios);
static void exchange_func(struct bt_conn *conn, uint8_t att_err, struct bt_gatt_exchange_params *params);
#define BLE_NUS_THROUGHPUT_MAX
#define BLE_NUS_THROUGHPUT_TEST
#if defined(BLE_NUS_THROUGHPUT_MAX)
static K_SEM_DEFINE(nus_connection_sem,0,1);
static const char*phy2str(uint8_t phy)
{
switch (phy)
{
case 0:return"NO packets";
case BT_GAP_LE_PHY_1M:return"LE 1M";
case BT_GAP_LE_PHY_2M:return"LE 2M";
case BT_GAP_LE_PHY_CODED:return "LE Coded";
default: return "Unknown";
}
}
#endif
static K_SEM_DEFINE(ble_init_ok, 0, 1);
static struct bt_conn *current_conn;
static struct bt_conn *auth_conn;
static struct k_work adv_work;
static const struct device *uart = DEVICE_DT_GET(DT_CHOSEN(nordic_nus_uart));
static struct k_work_delayable uart_work;
struct uart_data_t {
void *fifo_reserved;
uint8_t data[UART_BUF_SIZE];
uint16_t len;
};
static K_FIFO_DEFINE(fifo_uart_tx_data);
static K_FIFO_DEFINE(fifo_uart_rx_data);
static const struct bt_data ad[] = {
BT_DATA_BYTES(BT_DATA_FLAGS, (BT_LE_AD_GENERAL | BT_LE_AD_NO_BREDR)),
BT_DATA(BT_DATA_NAME_COMPLETE, DEVICE_NAME, DEVICE_NAME_LEN),
};
static const struct bt_data sd[] = {
BT_DATA_BYTES(BT_DATA_UUID128_ALL, BT_UUID_NUS_VAL),
};
#ifdef CONFIG_UART_ASYNC_ADAPTER
UART_ASYNC_ADAPTER_INST_DEFINE(async_adapter);
#else
#define async_adapter NULL
#endif
// SPI 配置 (全局或静态)
static const struct spi_config spi_cfg = {
.frequency = SPI_FREQ, // 10 MHz
.operation = SPI_OP,
.slave = 0,
.cs = {0}, // CS 手动控制
};
struct rhs2116_dev {
const struct device *spi_dev;
struct gpio_dt_spec cs_gpios;
uint16_t regs[256]; // 寄存器缓存
};
static int rhs_write_reg(const struct device *spi_dev, struct gpio_dt_spec *cs, uint8_t reg, uint16_t val, bool update) {
uint8_t tx_buf[4] = {0x80, 0, (reg & 0xF0) >> 4, reg & 0x0F}; // WRITE: 10xx xxxx (MSB)
uint8_t cmd[4] = {0xA0 | (update ? 0x20 : 0), 0, reg >> 4, reg & 0x0F}; // U=1 if update
uint8_t val_h = val >> 8, val_l = val & 0xFF;
cmd[1] = val_h; cmd[2] = val_l; cmd[3] = val_l; // Echo lower 16
struct spi_buf tx = {.buf = cmd, .len = 4};
const struct spi_buf_set tx_set = {.buffers = &tx, .count = 1};
gpio_pin_set_dt(cs, 1); // CS high
int ret = spi_write(spi_dev, &spi_cfg, &tx_set); // Dummy for pipeline
gpio_pin_set_dt(cs, 0); // CS low
ret = spi_write(spi_dev, &spi_cfg, &tx_set);
gpio_pin_set_dt(cs, 1);
return ret;
}
static int rhs_read_reg(const struct device *spi_dev, struct gpio_dt_spec *cs, uint8_t reg, uint16_t *val) {
uint8_t cmd[4] = {0xC0, 0, reg >> 4, reg & 0x0F}; // READ: 11xx xxxx
uint8_t rx_buf[4];
struct spi_buf tx = {.buf = cmd, .len = 4};
struct spi_buf rx = {.buf = rx_buf, .len = 4}; // 4 bytes for 32-bit
struct spi_buf_set tx_set = {.buffers = &tx, .count = 1};
struct spi_buf_set rx_set = {.buffers = &rx, .count = 1};
gpio_pin_set_dt(cs, 1);
int ret = spi_transceive(spi_dev, &spi_cfg, &tx_set, &rx_set); // Pipeline read
gpio_pin_set_dt(cs, 0);
ret = spi_transceive(spi_dev, &spi_cfg, &tx_set, &rx_set);
gpio_pin_set_dt(cs, 1);
*val = (rx_buf[2] << 8) | rx_buf[3]; // Lower 16 bits
return ret;
}
static int rhs_init(struct rhs2116_dev *dev) {
// 清零寄存器缓存
memset(dev->regs, 0, sizeof(dev->regs));
// 手册初始化序列 (page 45)
rhs_write_reg(dev->spi_dev, &dev->cs_gpios, REG_DC_AMP_POWER, INIT_DC_POWER, false);
rhs_write_reg(dev->spi_dev, &dev->cs_gpios, REG_ADC_BIAS, INIT_ADC_BIAS, false);
rhs_write_reg(dev->spi_dev, &dev->cs_gpios, REG_DSP_CTRL, INIT_DSP_CTRL, false);
rhs_write_reg(dev->spi_dev, &dev->cs_gpios, REG_RH1_SEL, INIT_RH1_SEL, false);
rhs_write_reg(dev->spi_dev, &dev->cs_gpios, REG_RH2_SEL, INIT_RH2_SEL, false);
rhs_write_reg(dev->spi_dev, &dev->cs_gpios, REG_RL_A_SEL, INIT_RL_A_SEL, false);
rhs_write_reg(dev->spi_dev, &dev->cs_gpios, REG_RL_B_SEL, INIT_RL_B_SEL, false);
rhs_write_reg(dev->spi_dev, &dev->cs_gpios, REG_AC_AMP_POWER, INIT_AC_POWER, false);
rhs_write_reg(dev->spi_dev, &dev->cs_gpios, REG_FAST_SETTLE, INIT_FAST_SETTLE, true); // U=1
rhs_write_reg(dev->spi_dev, &dev->cs_gpios, REG_AMP_FL_SEL, INIT_AMP_FL_SEL, true); // U=1
rhs_write_reg(dev->spi_dev, &dev->cs_gpios, REG_STIM_STEP, INIT_STIM_STEP, false);
rhs_write_reg(dev->spi_dev, &dev->cs_gpios, REG_STIM_BIAS, INIT_STIM_BIAS, false);
rhs_write_reg(dev->spi_dev, &dev->cs_gpios, REG_CL_RECOV_V, INIT_CL_V, false);
rhs_write_reg(dev->spi_dev, &dev->cs_gpios, REG_CL_RECOV_I, INIT_CL_I, false);
rhs_write_reg(dev->spi_dev, &dev->cs_gpios, REG_STIM_EN_A, INIT_STIM_EN_A, false); // 禁用刺激
rhs_write_reg(dev->spi_dev, &dev->cs_gpios, REG_STIM_EN_B, INIT_STIM_EN_B, false);
rhs_write_reg(dev->spi_dev, &dev->cs_gpios, REG_STIM_ON, INIT_STIM_ON, true); // U=1
rhs_write_reg(dev->spi_dev, &dev->cs_gpios, REG_STIM_POL, INIT_STIM_POL, true); // U=1
rhs_write_reg(dev->spi_dev, &dev->cs_gpios, REG_CHARGE_REC_SW, INIT_CHARGE_REC_SW, true); // U=1
rhs_write_reg(dev->spi_dev, &dev->cs_gpios, REG_CL_RECOV_EN, INIT_CL_EN, true); // U=1
// 验证芯片 ID (ROM 255)
uint16_t chip_id;
rhs_read_reg(dev->spi_dev, &dev->cs_gpios, 255, &chip_id);
if (chip_id != RHS_CHIP_ID) return -1;
LOG_INF("RHS2116 initialized, ID=0x%04X", chip_id);
return 0;
}
static void rhs_sample_all(struct rhs2116_dev *dev1, struct rhs2116_dev *dev2, int16_t *samples) {
uint8_t cmd[4], rx[4];
struct spi_buf tx_buf = {.buf = cmd, .len = 4};
struct spi_buf rx_buf = {.buf = rx, .len = 4};
struct spi_buf_set tx_set = { .buffers = &tx_buf, .count = 1 };
struct spi_buf_set rx_set = { .buffers = &rx_buf, .count = 1 };
// Dummy for pipeline
gpio_pin_set_dt(&dev1->cs_gpios, 1);
spi_transceive(dev1->spi_dev, &spi_cfg, &tx_set, &rx_set);
gpio_pin_set_dt(&dev1->cs_gpios, 0);
for (int ch = 0; ch < 16; ch++) {
// CONVERT(ch): 00 C[5:0] 0000 0000 0000 0000, D=0 (AC only)
cmd[0] = 0x00;
cmd[1] = 0x00;
cmd[2] = (ch & 0x3F) << 2; // C[5:0] << 2
cmd[3] = 0x00;
gpio_pin_set_dt(&dev1->cs_gpios, 0);
spi_transceive(dev1->spi_dev, &spi_cfg, &tx_set, &rx_set);
gpio_pin_set_dt(&dev1->cs_gpios, 1);
samples[ch] = (int16_t)((rx[0] << 8) | rx[1]); // AC high 16-bit
// 辅助命令 (dummy READ(255) for pipeline, M=1 clear compliance)
cmd[0] = 0xC4; // READ + M=1
cmd[1] = 0x00;
cmd[2] = 0xFF; // Reg 255
cmd[3] = 0xFF;
gpio_pin_set_dt(&dev1->cs_gpios, 0);
spi_transceive(dev1->spi_dev, &spi_cfg, &tx_set, &rx_set);
gpio_pin_set_dt(&dev1->cs_gpios, 1);
}
// 类似采样 dev2 (通道 16-31), offset samples[ch+16]
// Dummy for pipeline on dev2
gpio_pin_set_dt(&dev2->cs_gpios, 1);
spi_transceive(dev2->spi_dev, &spi_cfg, &tx_set, &rx_set);
gpio_pin_set_dt(&dev2->cs_gpios, 0);
for (int ch = 0; ch < 16; ch++) {
// CONVERT(ch): 00 C[5:0] 0000 0000 0000 0000, D=0 (AC only)
cmd[0] = 0x00;
cmd[1] = 0x00;
cmd[2] = (ch & 0x3F) << 2; // C[5:0] << 2
cmd[3] = 0x00;
gpio_pin_set_dt(&dev2->cs_gpios, 0);
spi_transceive(dev2->spi_dev,&spi_cfg, &tx_set, &rx_set);
gpio_pin_set_dt(&dev2->cs_gpios, 1);
samples[ch + 16] = (int16_t)((rx[0] << 8) | rx[1]); // AC high 16-bit
// 辅助命令 (dummy READ(255) for pipeline, M=1 clear compliance)
cmd[0] = 0xC4; // READ + M=1
cmd[1] = 0x00;
cmd[2] = 0xFF; // Reg 255
cmd[3] = 0xFF;
gpio_pin_set_dt(&dev2->cs_gpios, 0);
spi_transceive(dev2->spi_dev, &spi_cfg, &tx_set, &rx_set);
gpio_pin_set_dt(&dev2->cs_gpios, 1);
}
}
static const struct gpio_dt_spec en_vstim_spec = GPIO_DT_SPEC_GET(DT_PATH(zephyr_user), vstim_gpios);
static const struct gpio_dt_spec en_power_spec = GPIO_DT_SPEC_GET(DT_PATH(zephyr_user), power_gpios);
// // I2C总线(从rtio_loopback参考)
// static const struct device *i2c_bus = DEVICE_DT_GET(DT_NODELABEL(i2c1));
// // LT3582 I2C地址(7位)
// #define LT3582_ADDR 0x45
// static int configure_lt3582(void) {
// struct i2c_msg msg;
// uint8_t buf[2];
// int ret;
// // 1. 写CMDR (0x04): SWOFF=1 (0x10) + PUSEQ=3 (0x03) = 0x13 (禁用开关,设序列)
// buf[0] = 0x04; // 寄存器地址
// buf[1] = 0x13; // 值
// msg.buf = buf;
// msg.len = 2;
// msg.flags = I2C_MSG_WRITE | I2C_MSG_STOP;
// ret = i2c_transfer(i2c_bus, LT3582_ADDR, &msg, 1);
// if (ret) {
// printk("LT3582 CMDR write failed: %d\n", ret);
// return ret;
// }
// printk("LT3582 CMDR set (SWOFF=1, PUSEQ=11)\n");
// // 2. 写REG0 (0x00): Vp=36 (0x24) for VOUTP=5V
// buf[0] = 0x00;
// buf[1] = 0x24;
// ret = i2c_transfer(i2c_bus, LT3582_ADDR, &msg, 1);
// if (ret) {
// printk("LT3582 REG0 write failed: %d\n", ret);
// return ret;
// }
// printk("LT3582 Vp set to 36 (VOUTP=5V)\n");
// // 3. 写REG1 (0x01): Vn=76 (0x4C) for VOUTN=-5V
// buf[0] = 0x01;
// buf[1] = 0x4C;
// ret = i2c_transfer(i2c_bus, LT3582_ADDR, &msg, 1);
// if (ret) {
// printk("LT3582 REG1 write failed: %d\n", ret);
// return ret;
// }
// printk("LT3582 Vn set to 76 (VOUTN=-5V)\n");
// // 4. 写CMDR (0x04): 清SWOFF=0 (0x00) + 保持PUSEQ=3 (0x03) = 0x03 (启用开关)
// buf[0] = 0x04;
// buf[1] = 0x03;
// ret = i2c_transfer(i2c_bus, LT3582_ADDR, &msg, 1);
// if (ret) {
// printk("LT3582 CMDR enable failed: %d\n", ret);
// return ret;
// }
// printk("LT3582 enabled (SWOFF=0)\n");
// return 0;
// }
// #define TX_RETRY_QUEUE_SIZE 10 // 重试队列深度
// static K_FIFO_DEFINE(tx_retry_fifo); // FIFO for retry
// struct tx_packet {
// uint8_t data[242];
// uint16_t len;
// };
// static void ADC_update(void)
// {
// //生成假数据(忽略ADS1299,模拟24字节/采样)
// for (uint8_t i = 0; i < 242; i++) {
// //ble_ADC[counter * 24+ i + 2] = i; // 假数据:每个通道固定值i(0-23),偏移2字节包头
// ble_ADC[i+2]=i;
// }
// //counter++; // 递增计数器
// //if (counter == 10) { // 累积10次(240字节 + 包头/序列号 = 242字节)
// // 复制到发送缓冲
// for (uint16_t i = 0; i < 242; i++) {
// ble_Tx[i] = ble_ADC[i];
// }
// ble_Tx[1] = (uint8_t)bag++; // 设置序列号(低8位),递增
// if (bag > 0xFF) bag = 0; // 循环0-255
// // 确保连续性(类似THI_update逻辑)
// if (LASTbag != (ble_Tx[1] - 1)) {
// ble_Tx[1] = (uint8_t)(LASTbag + 1);
// }
// LASTbag = ble_Tx[1];
// // 发送通过NUS(Zephyr API)
// //bt_nus_send(NULL, ble_Tx, 242);
// struct tx_packet *pkt = k_malloc(sizeof(struct tx_packet));
// if (!pkt) {
// printk("Malloc failed\n");
// return;
// }
// memcpy(pkt->data, ble_Tx, 242);
// pkt->len = 242;
// gpio_pin_toggle_dt(&led);
// int err = bt_nus_send(NULL, pkt->data, pkt->len);
// if (err) {
// // if (err == -ENOMEM) {
// // k_fifo_put(&tx_retry_fifo, pkt); // 入队重试
// //printk("ENOBUFS, queued for retry%d\n",err);}
// }
// else{
// // printk("ENOMEM, queued for retry%d\n",err);
// }
// // } //else {
// // printk("Send failed: %d\n", err);
// // k_free(pkt);
// // }
// // } else {
// // printk("Sent packet %d\n", LASTbag);
// // k_free(pkt);
// // }
// k_free(pkt);
// // counter = 0; // 重置计数器
// //}
// // 简单延时模拟采样间隔(可选,Zephyr中定时器已控制周期)
// //k_sleep(K_MSEC(1)); // 替换空循环,1ms稳定
// }
static void ADC_update(void)
{
//生成假数据(忽略ADS1299,模拟24字节/采样)
for (uint8_t i = 0; i < 194; i++) {
//ble_ADC[counter * 24+ i + 2] = i; // 假数据:每个通道固定值i(0-23),偏移2字节包头
// if (i < 121) {
// ble_ADC[i + 2] = 0; // 前一半(0~120):设为0
// } else {
// ble_ADC[i + 2] = 1; // 后一半(121~241):设为1
// }
// ble_ADC[i+2]=i;
if(ble_ADC[i+2]==255)
ble_ADC[i+2]=0;
else
ble_ADC[i+2]=255;
}
//counter++; // 递增计数器
//if (counter == 10) { // 累积10次(240字节 + 包头/序列号 = 242字节)
// 复制到发送缓冲
for (uint16_t i = 0; i < 194; i++) {
ble_Tx[i] = ble_ADC[i];
}
ble_Tx[1] = (uint8_t)bag++; // 设置序列号(低8位),递增
if (bag > 0xFF) bag = 0; // 循环0-255
// 确保连续性(类似THI_update逻辑)
if (LASTbag != (ble_Tx[1] - 1)) {
ble_Tx[1] = (uint8_t)(LASTbag + 1);
}
LASTbag = ble_Tx[1];
// 发送通过NUS(Zephyr API)
//bt_nus_send(NULL, ble_Tx, 242);
gpio_pin_toggle_dt(&led);
bt_nus_send(NULL, ble_Tx, 194);
// int err = bt_nus_send(NULL, ble_Tx, 242);
// if (err) {
// printk("Failed to send: %d\n", err); // 调试:错误如 -ENOMEM (资源不足,重试机制可加)
// } else {
// printk("Sent packet %d (242 bytes)\n", LASTbag); // 性能监控
// }
// counter = 0; // 重置计数器
//}
// 简单延时模拟采样间隔(可选,Zephyr中定时器已控制周期)
//k_sleep(K_MSEC(1)); // 替换空循环,1ms稳定
}
static void adc_timer_handler(struct k_timer *timer_id)
{
ARG_UNUSED(timer_id); // 避免未用警告
//ADC_update(); // 调用更新函数
k_work_submit(&adc_work);
}
static void adc_work_handler(struct k_work *work)
{
ARG_UNUSED(work);
ADC_update();
}
// static void uart_cb(const struct device *dev, struct uart_event *evt, void *user_data)
// {
// ARG_UNUSED(dev);
// // static uint8_t*current_buf;
// static bool buf_release;
// static size_t aborted_len;
// struct uart_data_t *buf;
// static uint8_t *aborted_buf;
// static bool disable_req;
// switch (evt->type) {
// case UART_TX_DONE:
// LOG_DBG("UART_TX_DONE");
// if ((evt->data.tx.len == 0) ||
// (!evt->data.tx.buf)) {
// return;
// }
// if (aborted_buf) {
// buf = CONTAINER_OF(aborted_buf, struct uart_data_t,
// data[0]);
// aborted_buf = NULL;
// aborted_len = 0;
// } else {
// buf = CONTAINER_OF(evt->data.tx.buf, struct uart_data_t,
// data[0]);
// }
// k_free(buf);
// buf = k_fifo_get(&fifo_uart_tx_data, K_NO_WAIT);
// if (!buf) {
// return;
// }
// if (uart_tx(uart, buf->data, buf->len, SYS_FOREVER_MS)) {
// LOG_WRN("Failed to send data over UART");
// }
// break;
// case UART_RX_RDY:
// LOG_DBG("UART_RX_RDY");
// buf = CONTAINER_OF(evt->data.rx.buf, struct uart_data_t, data[0]);
// buf->len += evt->data.rx.len;
// buf_release=false;
// if (disable_req) {
// return;
// }
// if ((evt->data.rx.buf[buf->len - 1] == '\n') ||
// (evt->data.rx.buf[buf->len - 1] == '\r')) {
// disable_req = true;
// uart_rx_disable(uart);
// }
// break;
// case UART_RX_DISABLED:
// LOG_DBG("UART_RX_DISABLED");
// disable_req = false;
// buf = k_malloc(sizeof(*buf));
// if (buf) {
// buf->len = 0;
// } else {
// LOG_WRN("Not able to allocate UART receive buffer");
// k_work_reschedule(&uart_work, UART_WAIT_FOR_BUF_DELAY);
// return;
// }
// uart_rx_enable(uart, buf->data, sizeof(buf->data),
// UART_WAIT_FOR_RX);
// break;
// case UART_RX_BUF_REQUEST:
// LOG_DBG("UART_RX_BUF_REQUEST");
// buf = k_malloc(sizeof(*buf));
// if (buf) {
// buf->len = 0;
// uart_rx_buf_rsp(uart, buf->data, sizeof(buf->data));
// } else {
// LOG_WRN("Not able to allocate UART receive buffer");
// }
// break;
// case UART_RX_BUF_RELEASED:
// LOG_DBG("UART_RX_BUF_RELEASED");
// buf = CONTAINER_OF(evt->data.rx_buf.buf, struct uart_data_t,
// data[0]);
// if (buf->len > 0) {
// k_fifo_put(&fifo_uart_rx_data, buf);
// } else {
// k_free(buf);
// }
// break;
// case UART_TX_ABORTED:
// LOG_DBG("UART_TX_ABORTED");
// if (!aborted_buf) {
// aborted_buf = (uint8_t *)evt->data.tx.buf;
// }
// aborted_len += evt->data.tx.len;
// buf = CONTAINER_OF((void *)aborted_buf, struct uart_data_t,
// data);
// uart_tx(uart, &buf->data[aborted_len],
// buf->len - aborted_len, SYS_FOREVER_MS);
// break;
// default:
// break;
// }
// }
// static void uart_work_handler(struct k_work *item)
// {
// struct uart_data_t *buf;
// buf = k_malloc(sizeof(*buf));
// if (buf) {
// buf->len = 0;
// } else {
// LOG_WRN("Not able to allocate UART receive buffer");
// k_work_reschedule(&uart_work, UART_WAIT_FOR_BUF_DELAY);
// return;
// }
// uart_rx_enable(uart, buf->data, sizeof(buf->data), UART_WAIT_FOR_RX);
// }
// static bool uart_test_async_api(const struct device *dev)
// {
// const struct uart_driver_api *api =
// (const struct uart_driver_api *)dev->api;
// return (api->callback_set != NULL);
// }
// static int uart_init(void)
// {
// int err;
// int pos;
// struct uart_data_t *rx;
// struct uart_data_t *tx;
// if (!device_is_ready(uart)) {
// return -ENODEV;
// }
// if (IS_ENABLED(CONFIG_USB_DEVICE_STACK)) {
// err = usb_enable(NULL);
// if (err && (err != -EALREADY)) {
// LOG_ERR("Failed to enable USB");
// return err;
// }
// }
// rx = k_malloc(sizeof(*rx));
// if (rx) {
// rx->len = 0;
// } else {
// return -ENOMEM;
// }
// k_work_init_delayable(&uart_work, uart_work_handler);
// if (IS_ENABLED(CONFIG_UART_ASYNC_ADAPTER) && !uart_test_async_api(uart)) {
// /* Implement API adapter */
// uart_async_adapter_init(async_adapter, uart);
// uart = async_adapter;
// }
// err = uart_callback_set(uart, uart_cb, NULL);
// if (err) {
// k_free(rx);
// LOG_ERR("Cannot initialize UART callback");
// return err;
// }
// if (IS_ENABLED(CONFIG_UART_LINE_CTRL)) {
// LOG_INF("Wait for DTR");
// while (true) {
// uint32_t dtr = 0;
// uart_line_ctrl_get(uart, UART_LINE_CTRL_DTR, &dtr);
// if (dtr) {
// break;
// }
// /* Give CPU resources to low priority threads. */
// k_sleep(K_MSEC(100));
// }
// LOG_INF("DTR set");
// err = uart_line_ctrl_set(uart, UART_LINE_CTRL_DCD, 1);
// if (err) {
// LOG_WRN("Failed to set DCD, ret code %d", err);
// }
// err = uart_line_ctrl_set(uart, UART_LINE_CTRL_DSR, 1);
// if (err) {
// LOG_WRN("Failed to set DSR, ret code %d", err);
// }
// }
// tx = k_malloc(sizeof(*tx));
// if (tx) {
// pos = snprintf(tx->data, sizeof(tx->data),
// "Starting Nordic UART service sample\r\n");
// if ((pos < 0) || (pos >= sizeof(tx->data))) {
// k_free(rx);
// k_free(tx);
// LOG_ERR("snprintf returned %d", pos);
// return -ENOMEM;
// }
// tx->len = pos;
// } else {
// k_free(rx);
// return -ENOMEM;
// }
// err = uart_tx(uart, tx->data, tx->len, SYS_FOREVER_MS);
// if (err) {
// k_free(rx);
// k_free(tx);
// LOG_ERR("Cannot display welcome message (err: %d)", err);
// return err;
// }
// err = uart_rx_enable(uart, rx->data, sizeof(rx->data), UART_WAIT_FOR_RX);
// if (err) {
// LOG_ERR("Cannot enable uart reception (err: %d)", err);
// /* Free the rx buffer only because the tx buffer will be handled in the callback */
// k_free(rx);
// }
// return err;
// }
static void adv_work_handler(struct k_work *work)
{
int err = bt_le_adv_start(BT_LE_ADV_CONN_FAST_2, ad, ARRAY_SIZE(ad), sd, ARRAY_SIZE(sd));
if (err) {
LOG_ERR("Advertising failed to start (err %d)", err);
return;
}
LOG_INF("Advertising successfully started");
}
static void advertising_start(void)
{
k_work_submit(&adv_work);
}
static void update_data_length(struct bt_conn *conn)
{
int err;
struct bt_conn_le_data_len_param my_data_len = {
.tx_max_len = BT_GAP_DATA_LEN_MAX,
.tx_max_time = BT_GAP_DATA_TIME_MAX,
};
err = bt_conn_le_data_len_update(conn, &my_data_len);
if (err) {
LOG_ERR("data_len_update failed (err %d)", err);
}
}
static struct bt_gatt_exchange_params exchange_params;
static void update_mtu(struct bt_conn *conn)
{
int err;
exchange_params.func = exchange_func;
err = bt_gatt_exchange_mtu(conn, &exchange_params);
if (err) {
LOG_ERR("bt_gatt_exchange_mtu failed (err %d)", err);
}
}
static void exchange_func(struct bt_conn *conn, uint8_t att_err,
struct bt_gatt_exchange_params *params)
{
LOG_INF("MTU exchange %s", att_err == 0 ? "successful" : "failed");
if (!att_err) {
uint16_t payload_mtu = bt_gatt_get_mtu(conn) - 3; // 3 bytes used for Attribute headers.
LOG_INF("New MTU: %d bytes", payload_mtu);
}
}
void on_le_data_len_updated(struct bt_conn *conn, struct bt_conn_le_data_len_info *info)
{
uint16_t tx_len = info->tx_max_len;
uint16_t tx_time = info->tx_max_time;
uint16_t rx_len = info->rx_max_len;
uint16_t rx_time = info->rx_max_time;
LOG_INF("Data length updated. Length %d/%d bytes, time %d/%d us", tx_len, rx_len, tx_time, rx_time);
}
// static void mtu_exchange_cb(struct bt_conn *conn, uint8_t err, struct bt_gatt_exchange_params *params)
// {
// if (err) {
// printk("MTU exchange failed (err %u)\n", err);
// } else {
// size_t mtu_size = bt_gatt_get_mtu(conn);
// printk("MTU exchange successful, negotiated MTU: %zu\n", mtu_size);
// // 期望 mtu_size = 247(如果 central 支持 >= 247)
// }
// }
// // 定义 MTU 交换参数
// static struct bt_gatt_exchange_params mtu_params = {
// .func = mtu_exchange_cb,
// };
// static struct bt_conn*current_conn=NULL;
static void connected(struct bt_conn *conn, uint8_t err)
{
char addr[BT_ADDR_LE_STR_LEN];
if (err) {
LOG_ERR("Connection failed, err 0x%02x %s", err, bt_hci_err_to_str(err));
return;
}
bt_addr_le_to_str(bt_conn_get_dst(conn), addr, sizeof(addr));
LOG_INF("Connected %s", addr);
// 先发起 MTU 交换,并检查返回值
// int ret = bt_gatt_exchange_mtu(conn, &mtu_params);
// if (ret) {
// printk("MTU exchange request failed (err %d)\n", ret);
// if (ret == -EALREADY) {
// // 已交换过,直接获取当前 MTU
// size_t mtu_size = bt_gatt_get_mtu(conn);
// printk("MTU already exchanged, current MTU: %zu\n", mtu_size);
// } else {
// // 其他错误处理,例如重试或日志
// // 可根据需要添加重试逻辑:atomic_clear_bit(conn->flags, BT_CONN_ATT_MTU_EXCHANGED); 然后重试(调试用,非推荐)
// }
// }
struct bt_le_conn_param param={
.interval_min=0x0006,
.interval_max=0x0006,
.latency=0x0000,
.timeout=0x00C8,
};
bt_conn_le_param_update(conn,¶m);
struct bt_conn_le_phy_param phy_param ={
.pref_tx_phy=BT_GAP_LE_PHY_2M,
.pref_rx_phy=BT_GAP_LE_PHY_2M,
.options=0
};
bt_conn_le_phy_update(conn,&phy_param);
current_conn = bt_conn_ref(conn);
if (!current_conn) {
printk("Failed to reference connection");
return;
}
printk("Connection referenced successfully");
// k_work_delayable_init(¶m_update_work,param_update_work_handler);
// k_work_schedule(¶m_update_work,K_MSEC(300));
//k_timer_start(&adc_timer,K_MSEC(1000),K_MSEC(1000));
dk_set_led_on(CON_STATUS_LED);
#if defined(BLE_NUS_THROUGHPUT_MAX)
k_sem_give(&nus_connection_sem);
#endif
//uint16_t mtu;
//bt_gatt_exchange_mtu(conn,&mtu_params);
//size_t mtu_size=bt_gatt_get_mtu(conn);
k_sleep(K_MSEC(1000)); // Delay added to avoid link layer collisions.
update_data_length(conn);
update_mtu(conn);
//update_phy(conn);
}
// static void param_update_work_handler(struct k_work *work) {
// // 请求数据长度扩展
// bt_conn_le_data_len_update(current_conn, BT_LE_DATA_LEN_PARAM(BT_LE_DATA_LEN_PARAM_MAX));
// // 请求 PHY 更新(2Mbps)
// bt_conn_le_phy_update(current_conn, BT_CONN_LE_PHY_PARAM_2M);
// }
static void disconnected(struct bt_conn *conn, uint8_t reason)
{
char addr[BT_ADDR_LE_STR_LEN];
bt_addr_le_to_str(bt_conn_get_dst(conn), addr, sizeof(addr));
LOG_INF("Disconnected: %s, reason 0x%02x %s", addr, reason, bt_hci_err_to_str(reason));
if (auth_conn) {
bt_conn_unref(auth_conn);
auth_conn = NULL;
}
if (current_conn) {
bt_conn_unref(current_conn);
current_conn = NULL;
dk_set_led_off(CON_STATUS_LED);
}
}
// static struct bt_conn_cb conn_callbacks = {
// .connected=connected,
// .disconnected=disconnected,
// };
// bt_conn_cb_register(&conn_callbacks);
static void recycled_cb(void)
{
LOG_INF("Connection object available from previous conn. Disconnect is complete!");
advertising_start();
}
#ifdef CONFIG_BT_NUS_SECURITY_ENABLED
static void security_changed(struct bt_conn *conn, bt_security_t level,
enum bt_security_err err)
{
char addr[BT_ADDR_LE_STR_LEN];
bt_addr_le_to_str(bt_conn_get_dst(conn), addr, sizeof(addr));
if (!err) {
LOG_INF("Security changed: %s level %u", addr, level);
} else {
LOG_WRN("Security failed: %s level %u err %d %s", addr, level, err,
bt_security_err_to_str(err));
}
}
#endif
#if defined(BLE_NUS_THROUGHPUT_MAX)
static bool le_param_req(struct bt_conn *conn, struct bt_le_conn_param *param)
{
LOG_INF("Connection parameters update request received.");
LOG_INF("Minimum interval: %d, Maximum interval: %d",
param->interval_min, param->interval_max);
LOG_INF("Latency: %d, Timeout: %d", param->latency, param->timeout);
return true;
}
static void le_param_updated(struct bt_conn *conn, uint16_t interval,
uint16_t latency, uint16_t timeout)
{
LOG_INF("Connection parameters updated."
" interval: %d, latency: %d, timeout: %d",
interval, latency, timeout);
}
static void le_phy_updated(struct bt_conn *conn,
struct bt_conn_le_phy_info *param)
{
LOG_INF("LE PHY updated: TX PHY %s, RX PHY %s",
phy2str(param->tx_phy), phy2str(param->rx_phy));
}
static void le_data_length_updated(struct bt_conn *conn,
struct bt_conn_le_data_len_info *info)
{
LOG_INF("LE data len updated: TX (len: %d time: %d)"
" RX (len: %d time: %d)", info->tx_max_len,
info->tx_max_time, info->rx_max_len, info->rx_max_time);
}
#endif
BT_CONN_CB_DEFINE(conn_callbacks) = {
.connected = connected,
.disconnected = disconnected,
.recycled = recycled_cb,
.le_data_len_updated = on_le_data_len_updated,
#if defined(BLE_NUS_THROUGHPUT_MAX)
.le_param_req = le_param_req,
.le_param_updated = le_param_updated,
.le_phy_updated = le_phy_updated,
.le_data_len_updated = le_data_length_updated,
#endif
#ifdef CONFIG_BT_NUS_SECURITY_ENABLED
.security_changed = security_changed,
#endif
};
#if defined(CONFIG_BT_NUS_SECURITY_ENABLED)
static void auth_passkey_display(struct bt_conn *conn, unsigned int passkey)
{
char addr[BT_ADDR_LE_STR_LEN];
bt_addr_le_to_str(bt_conn_get_dst(conn), addr, sizeof(addr));
LOG_INF("Passkey for %s: %06u", addr, passkey);
}
static void auth_passkey_confirm(struct bt_conn *conn, unsigned int passkey)
{
char addr[BT_ADDR_LE_STR_LEN];
auth_conn = bt_conn_ref(conn);
bt_addr_le_to_str(bt_conn_get_dst(conn), addr, sizeof(addr));
LOG_INF("Passkey for %s: %06u", addr, passkey);
if (IS_ENABLED(CONFIG_SOC_SERIES_NRF54HX) || IS_ENABLED(CONFIG_SOC_SERIES_NRF54LX)) {
LOG_INF("Press Button 0 to confirm, Button 1 to reject.");
} else {
LOG_INF("Press Button 1 to confirm, Button 2 to reject.");
}
}
static void auth_cancel(struct bt_conn *conn)
{
char addr[BT_ADDR_LE_STR_LEN];
bt_addr_le_to_str(bt_conn_get_dst(conn), addr, sizeof(addr));
LOG_INF("Pairing cancelled: %s", addr);
}
static void pairing_complete(struct bt_conn *conn, bool bonded)
{
char addr[BT_ADDR_LE_STR_LEN];
bt_addr_le_to_str(bt_conn_get_dst(conn), addr, sizeof(addr));
LOG_INF("Pairing completed: %s, bonded: %d", addr, bonded);
}
static void pairing_failed(struct bt_conn *conn, enum bt_security_err reason)
{
char addr[BT_ADDR_LE_STR_LEN];
bt_addr_le_to_str(bt_conn_get_dst(conn), addr, sizeof(addr));
LOG_INF("Pairing failed conn: %s, reason %d %s", addr, reason,
bt_security_err_to_str(reason));
}
static struct bt_conn_auth_cb conn_auth_callbacks = {
.passkey_display = auth_passkey_display,
.passkey_confirm = auth_passkey_confirm,
.cancel = auth_cancel,
};
static struct bt_conn_auth_info_cb conn_auth_info_callbacks = {
.pairing_complete = pairing_complete,
.pairing_failed = pairing_failed
};
#else
static struct bt_conn_auth_cb conn_auth_callbacks;
static struct bt_conn_auth_info_cb conn_auth_info_callbacks;
#endif
static void bt_receive_cb(struct bt_conn *conn, const uint8_t *const data,
uint16_t len)
{
// int err;
// char addr[BT_ADDR_LE_STR_LEN] = {0};
// bt_addr_le_to_str(bt_conn_get_dst(conn), addr, ARRAY_SIZE(addr));
// LOG_INF("Received data from: %s", addr);
// for (uint16_t pos = 0; pos != len;) {
// struct uart_data_t *tx = k_malloc(sizeof(*tx));
// if (!tx) {
// LOG_WRN("Not able to allocate UART send data buffer");
// return;
// }
// /* Keep the last byte of TX buffer for potential LF char. */
// size_t tx_data_size = sizeof(tx->data) - 1;
// if ((len - pos) > tx_data_size) {
// tx->len = tx_data_size;
// } else {
// tx->len = (len - pos);
// }
// memcpy(tx->data, &data[pos], tx->len);
// pos += tx->len;
// /* Append the LF character when the CR character triggered
// * transmission from the peer.
// */
// if ((pos == len) && (data[len - 1] == '\r')) {
// tx->data[tx->len] = '\n';
// tx->len++;
// }
// err = uart_tx(uart, tx->data, tx->len, SYS_FOREVER_MS);
// if (err) {
// k_fifo_put(&fifo_uart_tx_data, tx);
// }
// }
}
static struct bt_nus_cb nus_cb = {
.received = bt_receive_cb,
};
void error(void)
{
dk_set_leds_state(DK_ALL_LEDS_MSK, DK_NO_LEDS_MSK);
while (true) {
/* Spin for ever */
k_sleep(K_MSEC(1000));
}
}
#ifdef CONFIG_BT_NUS_SECURITY_ENABLED
static void num_comp_reply(bool accept)
{
if (accept) {
bt_conn_auth_passkey_confirm(auth_conn);
LOG_INF("Numeric Match, conn %p", (void *)auth_conn);
} else {
bt_conn_auth_cancel(auth_conn);
LOG_INF("Numeric Reject, conn %p", (void *)auth_conn);
}
bt_conn_unref(auth_conn);
auth_conn = NULL;
}
void button_changed(uint32_t button_state, uint32_t has_changed)
{
uint32_t buttons = button_state & has_changed;
if (auth_conn) {
if (buttons & KEY_PASSKEY_ACCEPT) {
num_comp_reply(true);
}
if (buttons & KEY_PASSKEY_REJECT) {
num_comp_reply(false);
}
}
}
#endif /* CONFIG_BT_NUS_SECURITY_ENABLED */
static void configure_gpio(void)
{
int err;
#ifdef CONFIG_BT_NUS_SECURITY_ENABLED
err = dk_buttons_init(button_changed);
if (err) {
LOG_ERR("Cannot init buttons (err: %d)", err);
}
#endif /* CONFIG_BT_NUS_SECURITY_ENABLED */
err = dk_leds_init();
if (err) {
LOG_ERR("Cannot init LEDs (err: %d)", err);
}
}
// 新增:采样线程函数
static void sampling_thread(void *arg1, void *arg2, void *arg3)
{
ARG_UNUSED(arg3); // 避免未用警告
struct rhs2116_dev *dev1 = (struct rhs2116_dev *)arg1;
struct rhs2116_dev *dev2 = (struct rhs2116_dev *)arg2;
int16_t samples[32];
while (1) {
rhs_sample_all(dev1, dev2, samples); // 采样 32 通道
// 输出示例(可替换为 bt_nus_send 打包发送)
for (int i = 0; i < 32; i++) {
printk("CH%d: %d (uV: %.3f)\n", i, samples[i], samples[i] * 0.195f);
// TODO: 打包 samples 到 ble_Tx 并 bt_nus_send(NULL, ble_Tx, len);
}
k_msleep(33); // ~30 kS/s 采样率
}
}
// 全局:线程栈和 ID 定义(文件作用域,避免 section 错误)
K_THREAD_STACK_DEFINE(sampling_thread_stack, 512); // 2048 字节 / sizeof(void*) = 512 words (ARM 32-bit)
struct k_thread sampling_thread_id; // 线程 ID 声明
int main(void)
{
int blink_status = 0;
int err = 0;
configure_gpio();
int ret;
// 3. 再使能TPS631010: GPIO EN_POWER = 高
ret = gpio_pin_configure_dt(&en_power_spec, GPIO_OUTPUT_ACTIVE);
if (ret < 0) {
printk("EN_POWER configure failed: %d\n", ret);
return -1;
}
gpio_pin_set_dt(&en_power_spec, 1); // 高电平
printk("EN_POWER enabled (TPS631010 active)\n");
// 1. 先使能LT3582: GPIO EN_Vstim = 高
ret = gpio_pin_configure_dt(&en_vstim_spec, GPIO_OUTPUT_ACTIVE);
if (ret < 0) {
printk("EN_Vstim configure failed: %d\n", ret);
return -1;
}
gpio_pin_set_dt(&en_vstim_spec, 1); // 高电平
printk("EN_Vstim enabled\n");
// k_msleep(10); // 短暂延时,确保稳定(可选)
// //2. 配置LT3582 I2C
// ret = configure_lt3582();
// if (ret < 0) {
// printk("LT3582 config failed\n");
// return -1;
// }
// k_msleep(100); // 等待电压稳定(根据手册软启动时间调整)
// // 3. 再使能TPS631010: GPIO EN_POWER = 高
// ret = gpio_pin_configure_dt(&en_power_spec, GPIO_OUTPUT_ACTIVE);
// if (ret < 0) {
// printk("EN_POWER configure failed: %d\n", ret);
// return -1;
// }
// gpio_pin_set_dt(&en_power_spec, 1); // 高电平
// printk("EN_POWER enabled (TPS631010 active)\n");
// err = uart_init();
// if (err) {
// error();
// }
if (IS_ENABLED(CONFIG_BT_NUS_SECURITY_ENABLED)) {
err = bt_conn_auth_cb_register(&conn_auth_callbacks);
if (err) {
LOG_ERR("Failed to register authorization callbacks. (err: %d)", err);
return 0;
}
err = bt_conn_auth_info_cb_register(&conn_auth_info_callbacks);
if (err) {
LOG_ERR("Failed to register authorization info callbacks. (err: %d)", err);
return 0;
}
}
err = bt_enable(NULL);
if (err) {
error();
}
LOG_INF("Bluetooth initialized");
const struct device *spi3 = DEVICE_DT_GET(DT_NODELABEL(spi3));
const struct device *spi4 = DEVICE_DT_GET(DT_NODELABEL(spi4));
// if (!device_is_ready(spi3) || !device_is_ready(spi4)) {
// printk("SPI not ready\n");
// return 0;
// //goto ble_only;
// }
// // 手动定义 CS GPIO (避免 DT_NODELABEL(rhs2116))
// struct gpio_dt_spec cs1 = {
// .port = DEVICE_DT_GET(DT_NODELABEL(gpio0)),
// .pin = 15,
// .dt_flags = GPIO_ACTIVE_LOW,
// };
// struct gpio_dt_spec cs2 = {
// .port = DEVICE_DT_GET(DT_NODELABEL(gpio0)),
// .pin = 3,
// .dt_flags = GPIO_ACTIVE_LOW,
// };
// struct rhs2116_dev rhs1 = {.spi_dev = spi3, .cs_gpios = cs1};
// struct rhs2116_dev rhs2 = {.spi_dev = spi4, .cs_gpios = cs2};
// gpio_pin_configure_dt(&rhs1.cs_gpios, GPIO_OUTPUT_ACTIVE);
// gpio_pin_configure_dt(&rhs2.cs_gpios, GPIO_OUTPUT_ACTIVE);
// err = rhs_init(&rhs1);
// if (err) { printk("RHS1 init failed %d\n", err); return 0; }
// err = rhs_init(&rhs2);
// if (err) { printk("RHS2 init failed %d\n", err); return 0; }
// k_thread_create(&sampling_thread_id, sampling_thread_stack, K_THREAD_STACK_SIZEOF(sampling_thread_stack),
// sampling_thread, &rhs1, &rhs2, NULL, 5, 0, K_FOREVER);
//ble_init:
k_sem_give(&ble_init_ok);
if (IS_ENABLED(CONFIG_SETTINGS)) {
settings_load();
}
err = bt_nus_init(&nus_cb);
if (err) {
LOG_ERR("Failed to initialize UART service (err: %d)", err);
return 0;
}
k_work_init(&adv_work, adv_work_handler);
k_work_init(&adc_work,adc_work_handler);
k_timer_init(&adc_timer,adc_timer_handler,NULL);
k_timer_start(&adc_timer,K_MSEC(3),K_MSEC(3));
advertising_start();
int rep;
//bool led_state = true;
if (!gpio_is_ready_dt(&led)) {
return 0;
}
rep = gpio_pin_configure_dt(&led, GPIO_OUTPUT_ACTIVE);
if (rep < 0) {
return 0;
}
ble_ADC[0]=0x64;
for (;;) {
dk_set_led(RUN_STATUS_LED, (++blink_status) % 2);
//bt_nus_send(NULL, ble_Tx, 8);
k_sleep(K_MSEC(RUN_LED_BLINK_INTERVAL));
}
}
void ble_write_thread(void)
{
/* Don't go any further until BLE is initialized */
k_sem_take(&ble_init_ok, K_FOREVER);
struct uart_data_t nus_data = {
.len = 0,
};
for (;;) {
/* Wait indefinitely for data to be sent over bluetooth */
struct uart_data_t *buf = k_fifo_get(&fifo_uart_rx_data,
K_FOREVER);
int plen = MIN(sizeof(nus_data.data) - nus_data.len, buf->len);
int loc = 0;
while (plen > 0) {
memcpy(&nus_data.data[nus_data.len], &buf->data[loc], plen);
nus_data.len += plen;
loc += plen;
if (nus_data.len >= sizeof(nus_data.data) ||
(nus_data.data[nus_data.len - 1] == '\n') ||
(nus_data.data[nus_data.len - 1] == '\r')) {
if (bt_nus_send(NULL, nus_data.data, nus_data.len)) {
LOG_WRN("Failed to send data over BLE connection");
}
nus_data.len = 0;
}
plen = MIN(sizeof(nus_data.data), buf->len - loc);
}
k_free(buf);
}
}
// 启动采样线程(自动运行,无需手动启用)
// K_THREAD_DEFINE(sampling_thread_id, 2048, sampling_thread, &rhs1, &rhs2, NULL, 5, 0, 0);
// 参数解释:
// - sampling_thread_id: 线程 ID(全局变量,可用于后续控制,如 k_thread_abort())
// - 2048: 栈大小(字节,根据采样复杂度调整;32 通道采样建议 1-4KB)
// - sampling_thread: 线程入口函数
// - &rhs1, &rhs2: 参数传递给线程(arg1 和 arg2)
// - 5: 优先级(中等;BLE 线程通常更高,如 7)
// - 0, 0: 延迟和选项(默认)
// K_THREAD_DEFINE(ble_write_thread_id, STACKSIZE, ble_write_thread, NULL, NULL,
// NULL, PRIORITY, 0, 0);





