
Hello Nordic Team,
I am using nRF5340 DK as a debugger/programmer to develop firmware for the Fanstel EV-WT02C40C module.
My goal is to do i2c communication between Renesas MCU and EV-WT02C40C board with nRF Connect SDK.
I have a few i2c communication related questions and would appreciate clarification.
SDK: nRF Connect SDK v3.2.1
Toolchain: nRF Connect SDK Toolchain v3.2.1
here i'm considering renesas MCU as master and nrf5340 MCU as slave. renesas mcu send data to nrf5340 mcu which i will publish on server with the help of wifi and MQTT
which sample code should i refer for my i2c communication query?



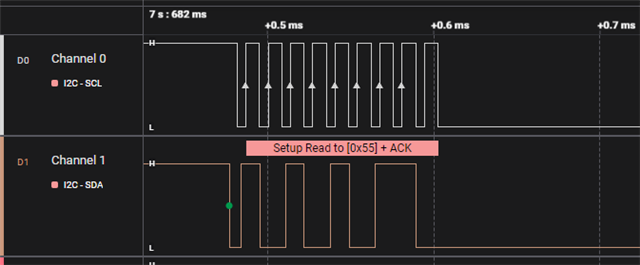 this is the waveforms
this is the waveforms