
Hi,
I have question related with some parameters of BLE transmision.
Connection interval in my project is set to 10 ms. Peripheral sends a notifications whenever the value of characteristic is changing - this interval is also set to 10 ms. So, I send one notification per single connection interval.
Whats more, I use a QDEC in my project (simplerdy mode) and I set pin P0.03 as a QDEC LED output to generate synchronized clock impulses.
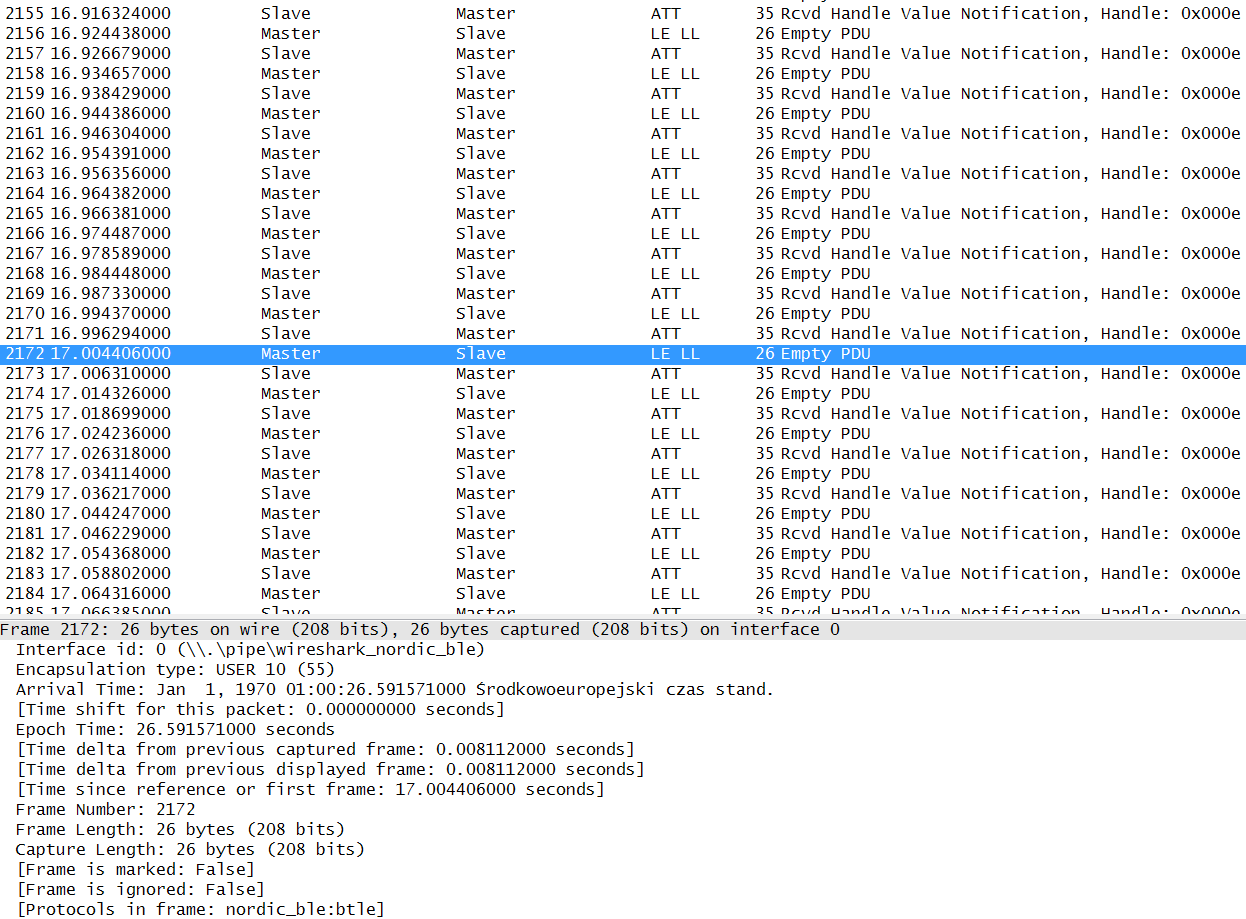
I captured connectionless BLE link from one device to another. Please see a screenshot below:
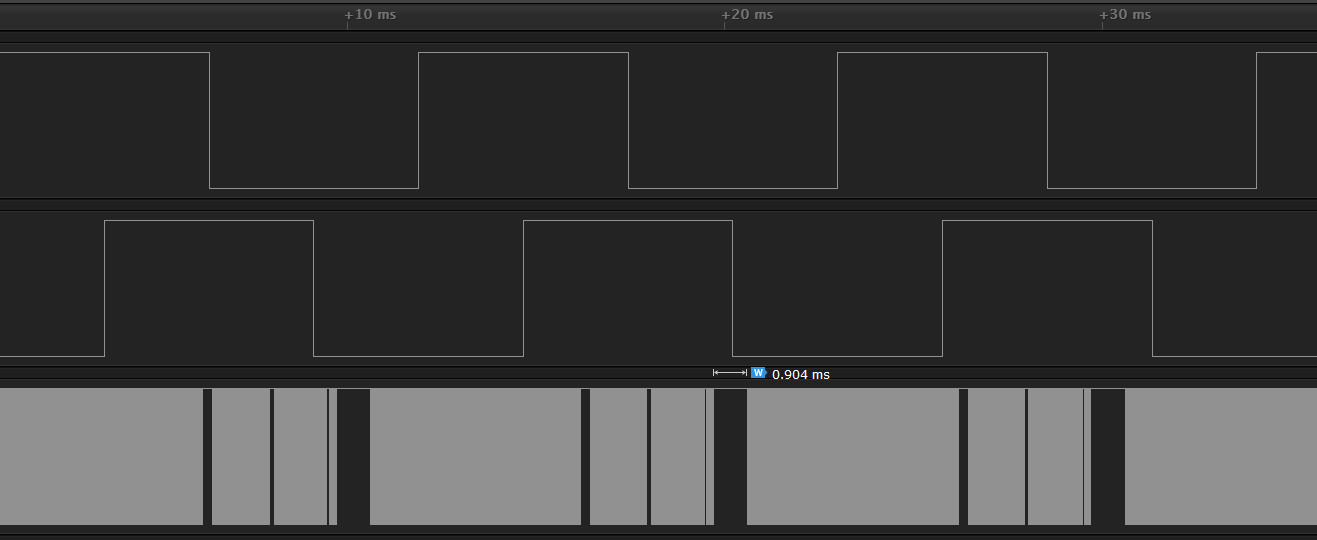
This is how looks waveform in that configuration - first and second lines are A and B signals from encoder, third is a sampling clock generated by the LED output:
When I disable notification waveform looks like this:
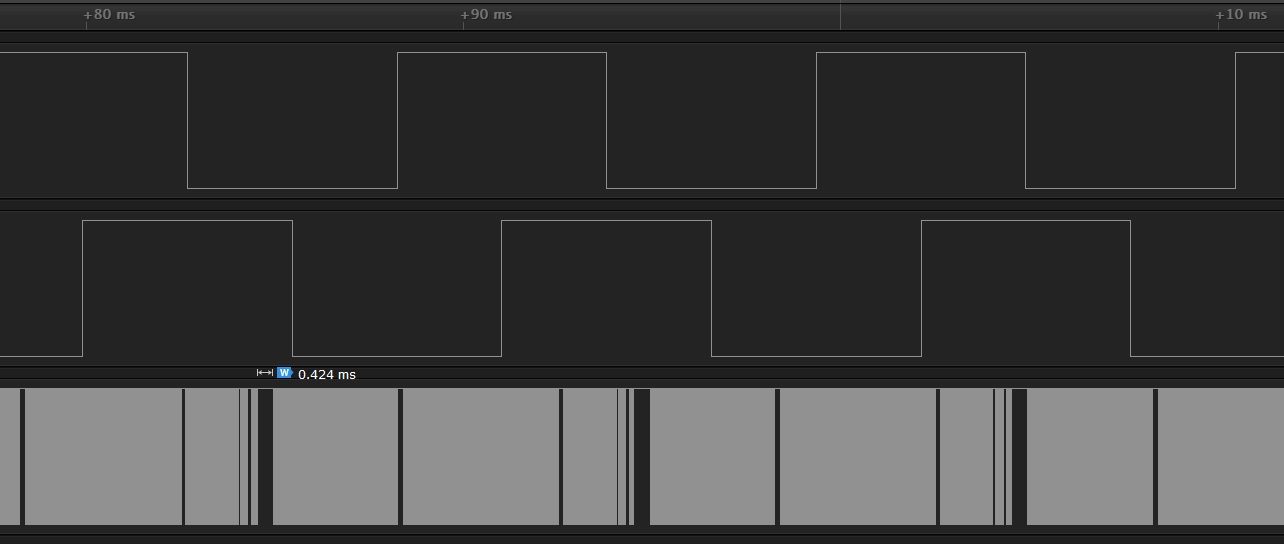
My main question is about LED output on these traces. They are generated according to parameters which I set in nrf_drv_config.h file. However in some periodic, regular intervals the line is hold for a some time in a high state. I guess that this is related with communication and connection interval. If the notifications are set, this time is around 0.9 ms, when they are not, the time is around 0.4 ms (connection interval parameter is still set to 10 ms). You can see these times on above waveforms.
This generates a problem for me, because I cannot count a encoder changes while LED output helds a high state.
Is it okay, that this occurs? Is it possible to decrease these times, if yes, how can I do that?

