
Hi, i'm using SPI to transfer data divided into packets of 24 bit from NRF51 to a DAC. The function that allows to send data is:
spi_master_send_recv(SPI_MASTER_1, data_vector_tx, 3, data_vector_rx, 0);
Analyzing the MOSI signal and the clock signal in the oscilloscope, I realized that it sends only 8 bit together at the first time, than other 8 bit, and finally other 8 bit. The problem is that the time between the first and the second sending is different from the time between the second and the third sending, as you can see below:
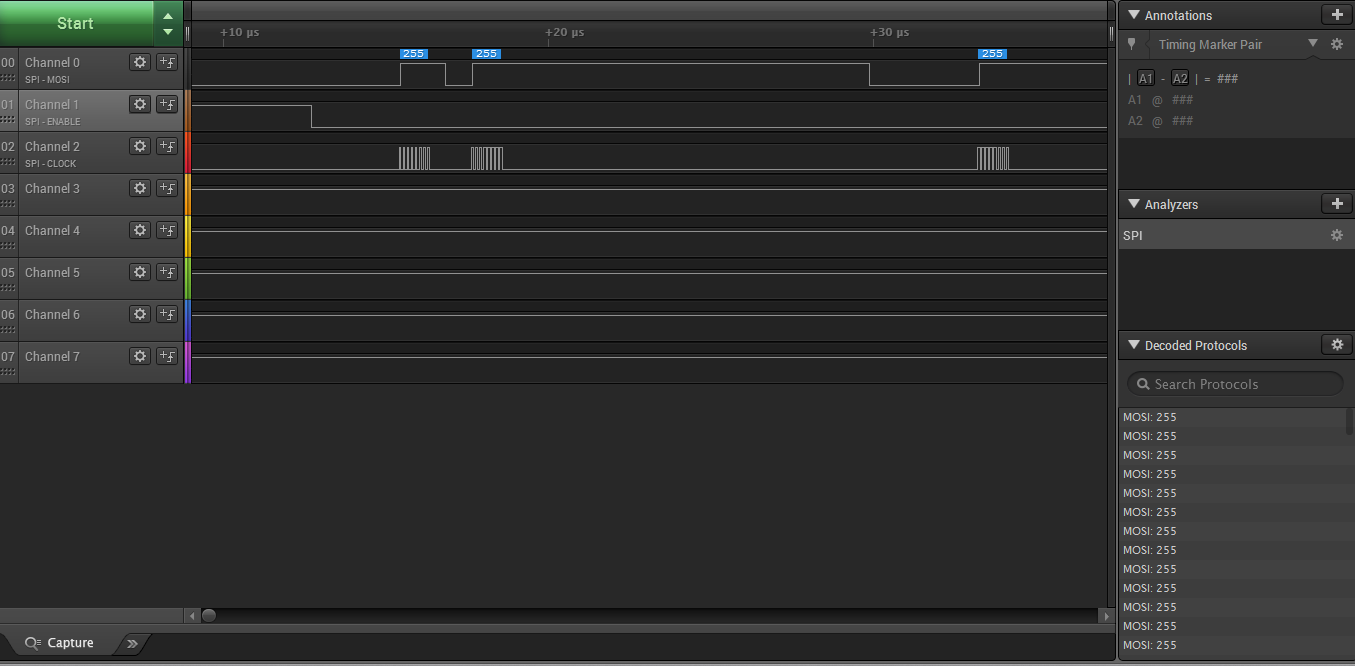
In this case, I'm sending 255,255,255. The SPI frequency is 8MHz.
- How can I reduce the time between the second and the third sending?
- Otherwise, can I send 24 bit at a time, changing the spi_master_send_recv function?
this is the main void function:
int main(void)
{
init_matrix();
spi_master_init(SPI_MASTER_1, spi_master_1_event_handler, false);
for (;; )
{
spi_master_send_recv(SPI_MASTER_1, data_vector_tx, 3, data_vector_rx, 0);
}
}
The spi_master_send_ recv is:
uint32_t spi_master_send_recv(const spi_master_hw_instance_t spi_master_hw_instance,
uint8_t * const p_tx_buf, const uint16_t tx_buf_len,
uint8_t * const p_rx_buf, const uint16_t rx_buf_len)
{ #if defined(SPI_MASTER_0_ENABLE) || defined(SPI_MASTER_1_ENABLE)
volatile spi_master_instance_t * p_spi_instance = spi_master_get_instance(
spi_master_hw_instance);
APP_ERROR_CHECK_BOOL(p_spi_instance != NULL);
uint32_t err_code = NRF_SUCCESS;
uint16_t max_length = 0;
uint8_t nested_critical_region = 0;
//Check if disable all IRQs flag is set
if (p_spi_instance->disable_all_irq)
{
//Disable interrupts.
APP_ERROR_CHECK(sd_nvic_critical_region_enter(&nested_critical_region));
}
else
{
//Disable interrupt SPI.
APP_ERROR_CHECK(sd_nvic_DisableIRQ(p_spi_instance->irq_type));
}
//Initialize and perform data transfer
if (p_spi_instance->state == SPI_MASTER_STATE_IDLE)
{
max_length = (rx_buf_len > tx_buf_len) ? rx_buf_len : tx_buf_len;
if (max_length > 0)
{
p_spi_instance->state = SPI_MASTER_STATE_BUSY;
p_spi_instance->bytes_count = 0;
p_spi_instance->started_flag = false;
p_spi_instance->max_length = max_length;
/* Initialize buffers */
spi_master_buffer_init(p_tx_buf,
tx_buf_len,
&(p_spi_instance->p_tx_buffer),
&(p_spi_instance->tx_length),
&(p_spi_instance->tx_index));
spi_master_buffer_init(p_rx_buf,
rx_buf_len,
&(p_spi_instance->p_rx_buffer),
&(p_spi_instance->rx_length),
&(p_spi_instance->rx_index));
nrf_gpio_pin_clear(p_spi_instance->pin_slave_select);
spi_master_send_initial_bytes(p_spi_instance);
}
else
{
err_code = NRF_ERROR_INVALID_PARAM;
}
}
else
{
err_code = NRF_ERROR_BUSY;
}
//Check if disable all IRQs flag is set.
if (p_spi_instance->disable_all_irq)
{
//Enable interrupts.
APP_ERROR_CHECK(sd_nvic_critical_region_exit(nested_critical_region));
}
else
{
//Enable SPI interrupt.
APP_ERROR_CHECK(sd_nvic_EnableIRQ(p_spi_instance->irq_type));
}
return err_code;
#else
return NRF_ERROR_NOT_SUPPORTED;
#endif
}
Thank you very much for your support. : - )
