Hi All,
I'm having trouble running one of my I2C sensors connected to the nrf52 when running at a 200hz sampling rate.
Interestingly enough, the same sensor seems to work just fine when running at 20Hz, so I'm thinking the nrf52 can't keep up with the sensor's interrupt firing every 5ms, while also handling all of the softdevice's timing requirements.
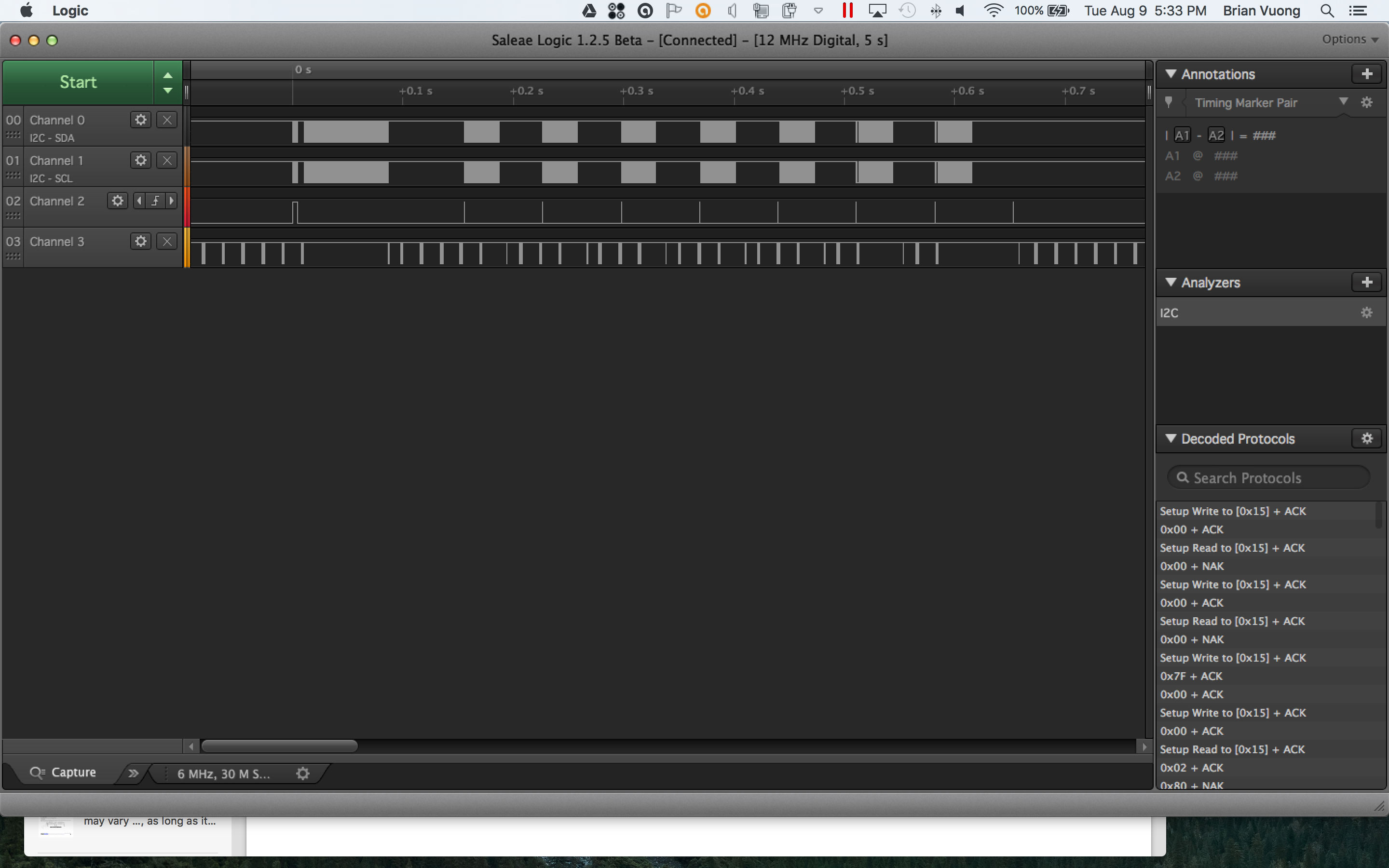
If you look at the attached logic analyzer captures, the top two lines are I2C SDA/SCL connected to the problematic sensor, the third line is the interrupt, and the 4th is the I2C line of the second I2C bus, you'll see that after the 8th interrupt, another interrupt is triggered around 0.6 seconds, but there's no further I2C activity for that sensor.
I'm using SDK11, NRF52 PC10040, S132 V2.0.0, with the scheduler and started the project using the ble_app_template.
Any thoughts or ideas on how I can ensure this GPIOTE interrupt gets serviced? Currently have the GPIOTE priority set low, and am implementing PAN #73