
image description(/attachment/6196b4481c3f6fefbd0784b78d9163c9)
Hello. I development education robot by ENTRY base.
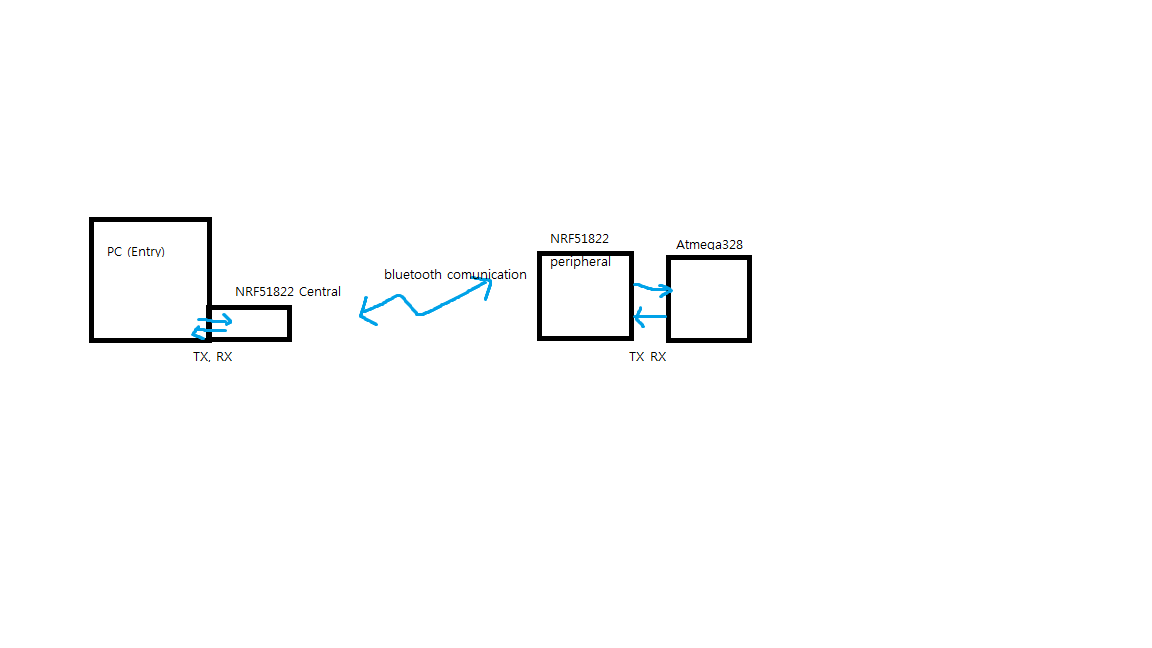
PC(ENTRY base) + NRF51822 central
and
NRF51822 Peripheral + Atmega328p u-com.
PC + NRF51822 central is serial communication.
NRF51822 peripheral + Atmega328 u-com also serial communication.
PC is every 200ms 0xFF 0x56 0x02 0x00 0x05 send to NRF51822 central.
and NRF51822 central send to NRF51822 peripheral bluetooth communication.
and NRF51822 peripheral send to Atmega328 u-com serial communicaton.
Atmega328 u-com is response 26 byte send to NRF51822 peripheral
and NRF51822 peripheral send to NRF51822 central bluetooth communicaton.
and NRF51822 central send to PC serial communication.
here is OK.
but If you send another command while sending every 200ms,
Software reset during operation.
Probably the buffer of communication is piled up or it seems to be a crash (serial and bluetooth).
please confirm it.
thank you
best regard.

{kind=link}