Hellow,
I'm using app_timer to play the buzzer.
The default behavior is
1. key in
2. timer start: 8Sec for key action stop check
3. Buzzer on (pwm1)
3. buzzer timer start
4. Buzzer timer stop.
5. buzzer off
The odd thing is
- Abnormal termination of the timer occurs.
- The 8 second timer in process 2 is terminated as soon as it starts.
- Due to this phenomenon, abnormal operation of the buzzer makes the overall wrong operation. Below is a log message. The current issue is being debugged for a few days now. Help is urgently needed.
Thank you.
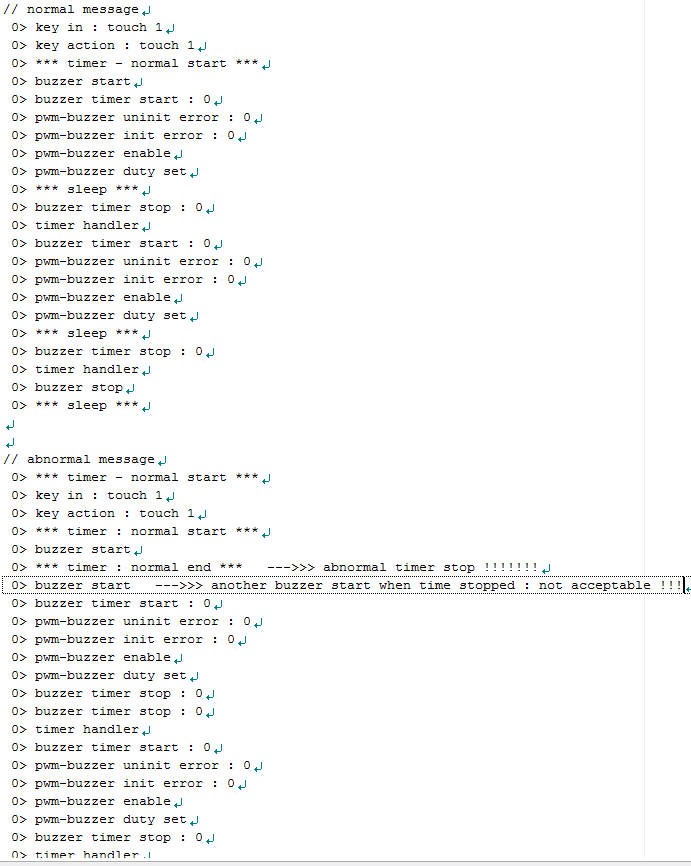
// *** normal message ***
0> key in : touch 1
0> key action : touch 1
0> *** timer - normal start ***
0> buzzer start
0> buzzer timer start : 0
0> pwm-buzzer uninit error : 0
0> pwm-buzzer init error : 0
0> pwm-buzzer enable
0> pwm-buzzer duty set
0> *** sleep ***
0> buzzer timer stop : 0
0> timer handler
0> buzzer timer start : 0
0> pwm-buzzer uninit error : 0
0> pwm-buzzer init error : 0
0> pwm-buzzer enable
0> pwm-buzzer duty set
0> *** sleep ***
0> buzzer timer stop : 0
0> timer handler
0> buzzer stop
0> *** sleep ***
// *** abnormal message ***
0> key in : touch 1
0> key action : touch 1
0> *** timer : normal start ***
0> buzzer start
0> *** timer : normal end *** --->>> abnormal timer stop !!!!!!!
0> buzzer start
0> buzzer timer start : 0
0> pwm-buzzer uninit error : 0
0> pwm-buzzer init error : 0
0> pwm-buzzer enable
0> pwm-buzzer duty set
0> buzzer timer stop : 0
0> buzzer timer stop : 0
0> timer handler
0> buzzer timer start : 0
0> pwm-buzzer uninit error : 0
0> pwm-buzzer init error : 0
0> pwm-buzzer enable
0> pwm-buzzer duty set
0> buzzer timer stop : 0
0> timer handler
0> buzzer stop
0> buzzer timer start : 0
0> pwm-buzzer uninit error : 0
0> pwm-buzzer init error : 0
0> pwm-buzzer enable
0> pwm-buzzer duty set
0> *** sleep ***
0> *** sleep ***