Hi,
I'm working on an application with an accelerometer without SoftDevice (for the moment). The accelerometer communicate in I2C. It send an interruption when a new sample is available (50Hz).
Some simple calculation are done on these values.
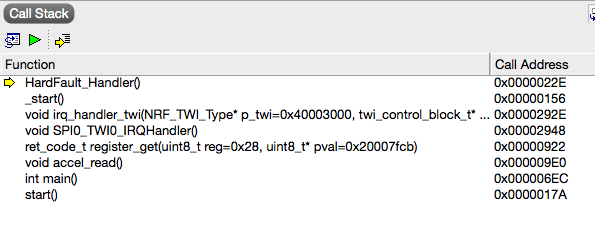
During debugging, I have some random hardfault. What can I do to understand the root cause of this hardfault?
I'm using Segger embedded studio. You can see below a screen shot of the call stack when that happened.