
Hi,
I want to sample lpcomp result at 50us, I'm doing so by using the following statements and set/clear a gpio based on the lpcomp result:
nrf_lpcomp_task_trigger(NRF_LPCOMP_TASK_SAMPLE); lpcomp_result = nrf_lpcomp_result_get();
This is done in 50us TIMER interrupt.
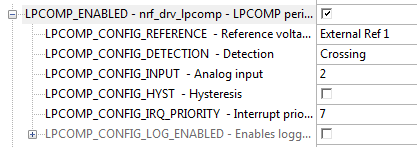
LPCOMP configuration :
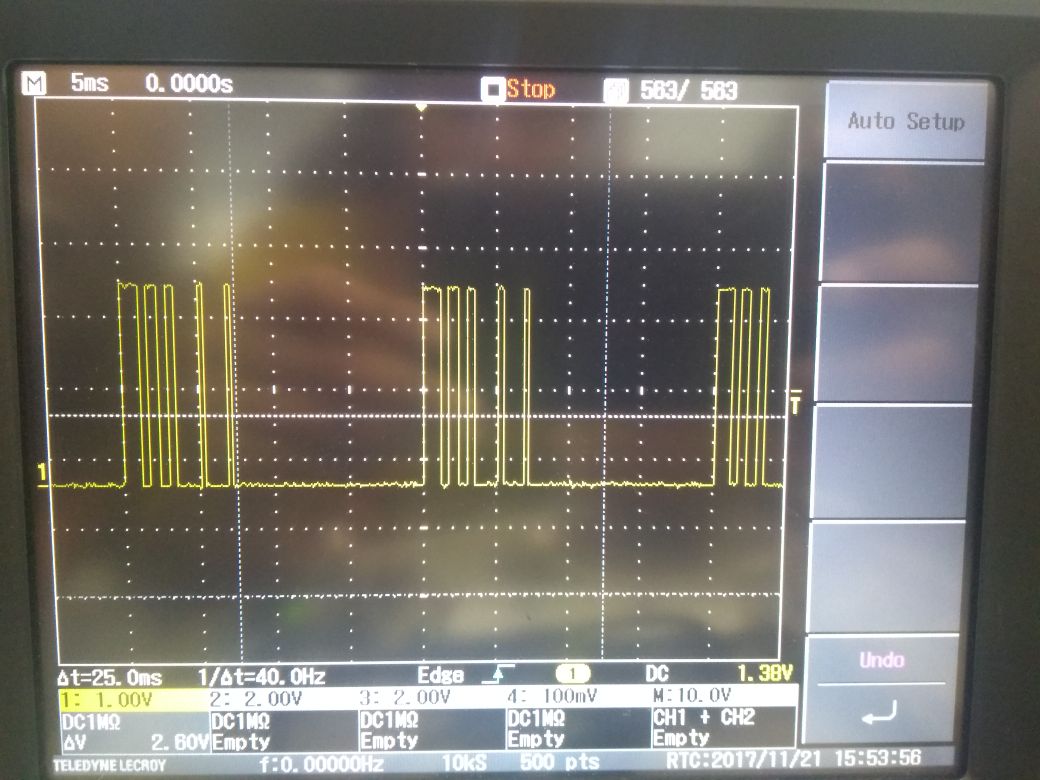
We observe some differences in the gpio waveform when an external comparator chip (LM2901N) is used instead of the internal LPCOMP. The observed waveforms are attached below.(some samples seem to be skipped while using the LPCOMP)
waveform using LPCOMP:
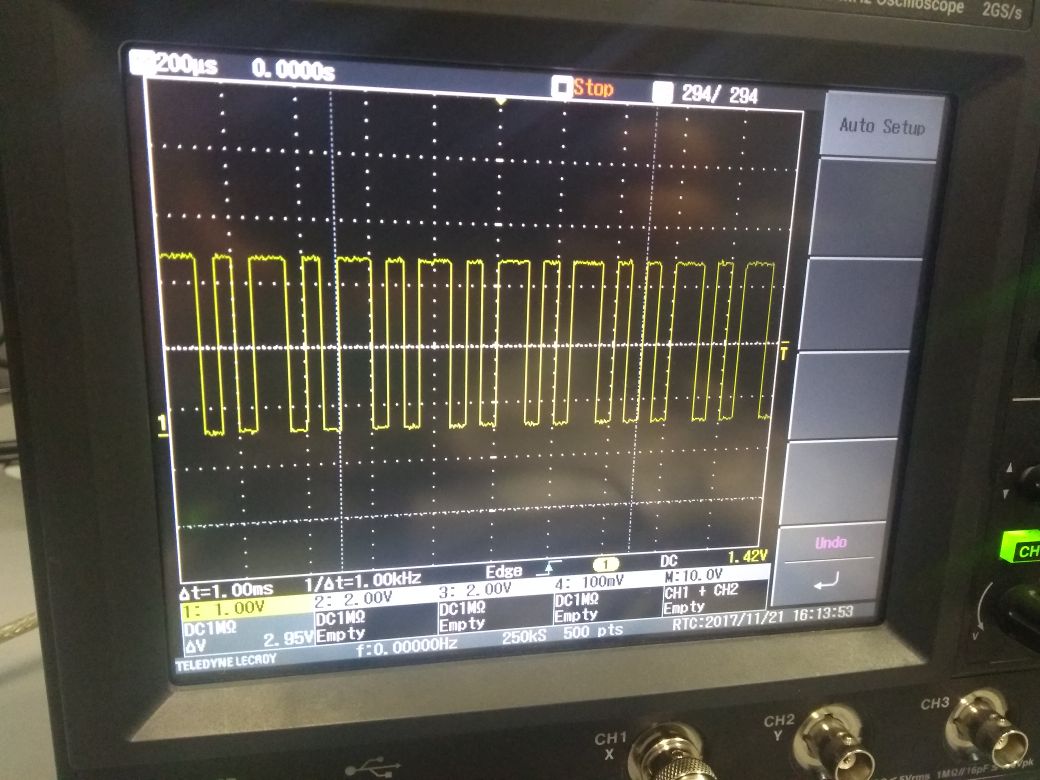
 waveform using external comparator chip:
waveform using external comparator chip:
Can we sample the LPCOMP at 50us rate? What are the limitations of LPCOMP? Is there a specific way to achieve this?

