
Hi guys,
I use the 51822's PWM recently, PWM is made by GPIOTE+PPI+TIMER, and the PWM source code as below(I use TIMER1, GPIOTE[0], PPI_CH[0], PPI_CH[1], period and duty means ticks with 16MHz):
void startPwm1(uint16_t period, uint16_t duty)
{
NRF_TIMER1->INTENCLR = TIMER_INTENSET_COMPARE0_Enabled << TIMER_INTENSET_COMPARE0_Pos;
NVIC_DisableIRQ(TIMER1_IRQn);
NRF_GPIOTE->CONFIG[0] = GPIOTE_CONFIG_MODE_Task << GPIOTE_CONFIG_MODE_Pos |
GPIOTE_CONFIG_POLARITY_Toggle << GPIOTE_CONFIG_POLARITY_Pos |
WAVE_PWM << GPIOTE_CONFIG_PSEL_Pos |
GPIOTE_CONFIG_OUTINIT_Low << GPIOTE_CONFIG_OUTINIT_Pos;
NRF_PPI->CH[0].EEP = (uint32_t) &NRF_TIMER1->EVENTS_COMPARE[0];
NRF_PPI->CH[0].TEP = (uint32_t) &NRF_GPIOTE->TASKS_OUT[0];
NRF_PPI->CH[1].EEP = (uint32_t) &NRF_TIMER1->EVENTS_COMPARE[1];
NRF_PPI->CH[1].TEP = (uint32_t) &NRF_GPIOTE->TASKS_OUT[0];
NRF_PPI->CHENSET = (PPI_CHENSET_CH0_Enabled << PPI_CHENSET_CH0_Pos) | (PPI_CHEN_CH1_Enabled<< PPI_CHEN_CH1_Pos);
NRF_TIMER1->TASKS_STOP = 1;
NRF_TIMER1->TASKS_CLEAR = 1;
// NRF_TIMER1->PRESCALER = 0;
NRF_TIMER1->CC[0] = period;
NRF_TIMER1->CC[1] = period - duty;
NRF_TIMER1->SHORTS = TIMER_SHORTS_COMPARE0_CLEAR_Enabled << TIMER_SHORTS_COMPARE0_CLEAR_Pos;
NRF_TIMER1->INTENCLR = TIMER_INTENSET_COMPARE0_Enabled << TIMER_INTENSET_COMPARE0_Pos;
NRF_TIMER1->TASKS_START = 1;
}
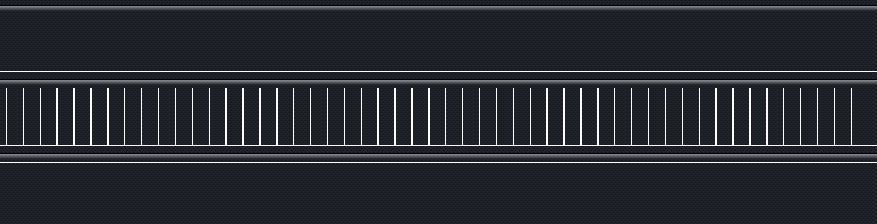
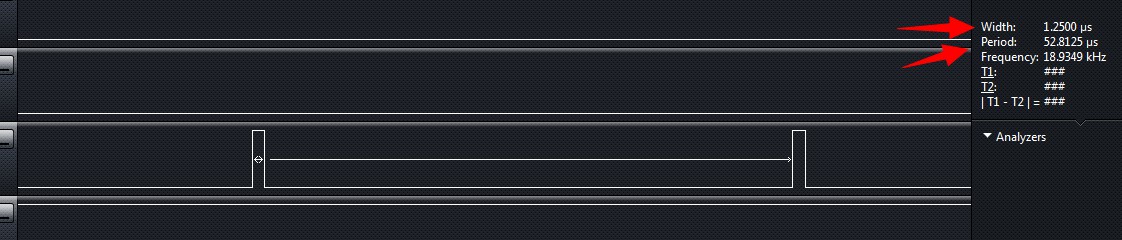
When I download the program to the development board, PWM works well(period is 842 ticks, duty is 20 ticks), As shown below:
Then power off the development board, and connected other 3.3V power supply to any 51822's GPIO port, then disconnected, power the development board, Now the PWM does not work well, as show below:
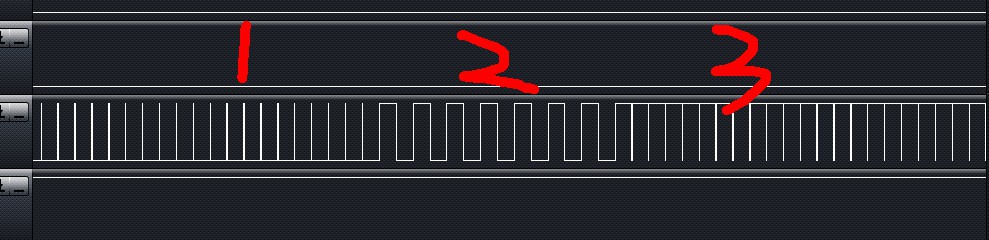
1 pwm works well, 3 looks like Inverted. It seems like GPIOTE's response is not in time.
So have you encountered this situation?
