
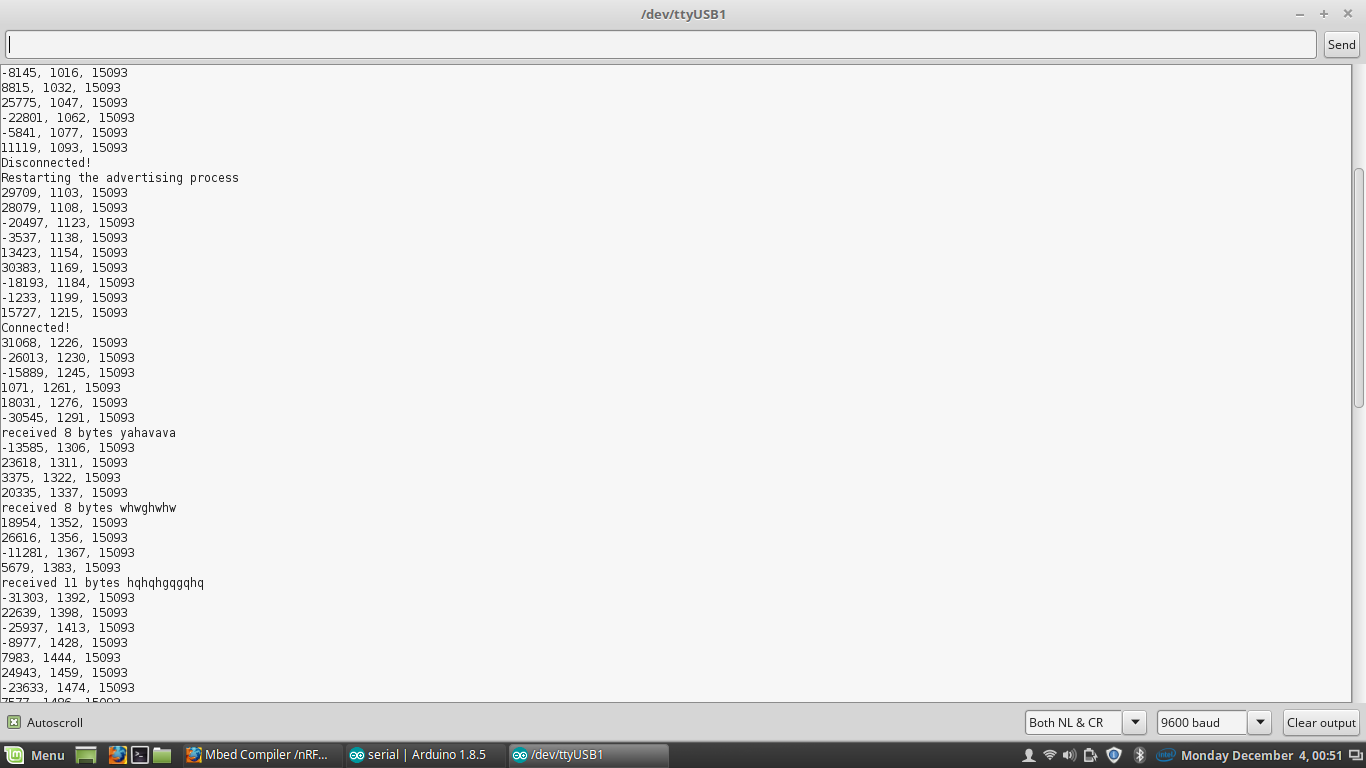
This is my coding implementation using mbed online compiler mbed code and this is serial pc result
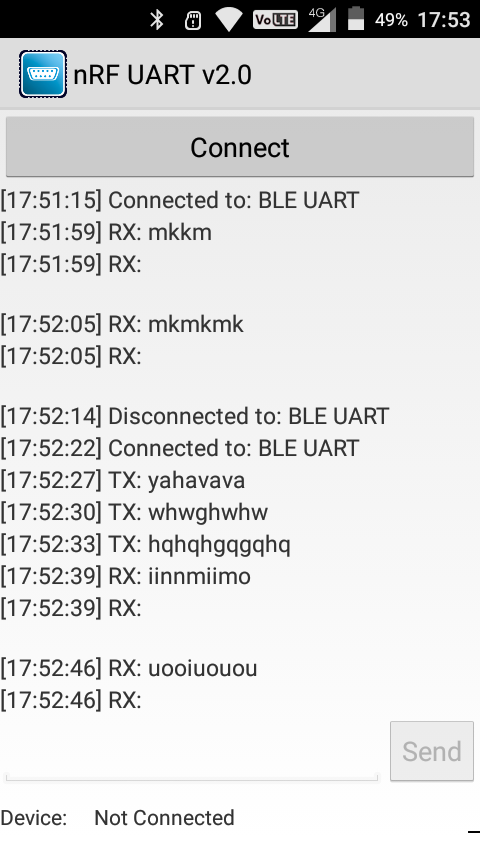
and this is the result over BLE using nRF UART app
how this program using serial pc console not synchronize with ADXL345 i2c using nRF51. so maybe all of you can answer this my confusing problem... please help me soon..
code using mbed compiler
#include "ADXL345_I2C.h"
#include "mbed.h"
#include "ble/BLE.h"
#include "ble/services/UARTService.h"
#include "Serial.h"
#define NEED_CONSOLE_OUTPUT 1 /* Set this if you need debug messages on the console;
* it will have an impact on code-size and power consumption. */
#if NEED_CONSOLE_OUTPUT
#define DEBUG(...) { printf(__VA_ARGS__); }
#else
#define DEBUG(...) /* nothing */
#endif /* #if NEED_CONSOLE_OUTPUT */
ADXL345_I2C accelerometer(p7, p30);
Serial pc(USBTX, USBRX);
BLEDevice ble;
DigitalOut led1(LED1);
Serial uart1(USBTX,USBRX);
UARTService *uartServicePtr;
uint8_t sFlag = 0;
void disconnectionCallback(const Gap::DisconnectionCallbackParams_t *params)
{
DEBUG("Disconnected!\n\r");
DEBUG("Restarting the advertising process\n\r");
ble.startAdvertising();
}
void connectionCallback(const Gap::ConnectionCallbackParams_t *params)
{
DEBUG("Connected!\n\r");
}
uint8_t b[40]={'a','d','q','w'};
void onDataWritten(const GattWriteCallbackParams *params)
{
if ((uartServicePtr != NULL) && (params->handle == uartServicePtr->getTXCharacteristicHandle()))
{
uint16_t bytesRead = params->len;
DEBUG("received %u bytes %s\n\r", bytesRead,params->data);
/*uint16_t bytesRead = params->len;
DEBUG("received %u bytes\n\r", bytesRead);
ble.updateCharacteristicValue(uartServicePtr->getRXCharacteristicHandle(), params->data, bytesRead);*/
}
}
void periodicCallback(void)
{
led1 = !led1;
}
uint8_t c;
void uartRx(void)
{
c = uart1.getc();
if(sFlag < 39)
b[sFlag++] = c;
if(c == '\r' || c == '\n' || sFlag == 15)
{
ble.updateCharacteristicValue(uartServicePtr->getRXCharacteristicHandle(), (const uint8_t*)b/*params->data*/, sFlag/*bytesRead*/);
sFlag = 0;
}
}
int main() {
pc.baud(9600);
int readings[3] = {0, 0, 0};
pc.printf("Starting ADXL345 test...\n");
wait(.001);
pc.printf("Device ID is: 0x%02x\n", accelerometer.getDeviceID());
wait(.001);
//Go into standby mode to configure the device.
accelerometer.setPowerControl(0x00);
//Full resolution, +/-16g, 4mg/LSB.
accelerometer.setDataFormatControl(0x0B);
//3.2kHz data rate.
accelerometer.setDataRate(ADXL345_3200HZ);
//Measurement mode.
accelerometer.setPowerControl(0x08);
led1 = 1;
uart1.baud(9600);
Ticker ticker;
ticker.attach(periodicCallback, 1);
uart1.attach(uartRx,Serial::RxIrq);
DEBUG("Initialising the nRF51822\n\r");
ble.init();
ble.onDisconnection(disconnectionCallback);
ble.onConnection(connectionCallback);
ble.onDataWritten(onDataWritten);
/* setup advertising */
ble.accumulateAdvertisingPayload(GapAdvertisingData::BREDR_NOT_SUPPORTED);
ble.setAdvertisingType(GapAdvertisingParams::ADV_CONNECTABLE_UNDIRECTED);
ble.accumulateAdvertisingPayload(GapAdvertisingData::SHORTENED_LOCAL_NAME,
(const uint8_t *)"BLE UART", sizeof("BLE UART") - 1);
ble.accumulateAdvertisingPayload(GapAdvertisingData::COMPLETE_LIST_128BIT_SERVICE_IDS,
(const uint8_t *)UARTServiceUUID_reversed, sizeof(UARTServiceUUID_reversed));
ble.setAdvertisingInterval(1000); /* 1000ms; in multiples of 0.625ms. */
ble.startAdvertising();
UARTService uartService(ble);
uartServicePtr = &uartService;
while (1)
{
ble.waitForEvent();
wait(0.1);
accelerometer.getOutput(readings);
pc.printf("%i, %i, %i\n", (int16_t)readings[0], (int16_t)readings[1], (int16_t)readings[2]);
}
}

