Is it possible to communicate between 2 Nordic kits at 1 M baud without HW flow control? I came across this post in the forum which states that bytes can be missed when switching from primary RAM buffer to secondary RAM buffer if flow control is not enabled. This is an older post. Is this still applicable to nRF52840 and SDK 14.2.0?
https://devzone.nordicsemi.com/f/nordic-q-a/14656/app_uart_communication_error-without-flow-control
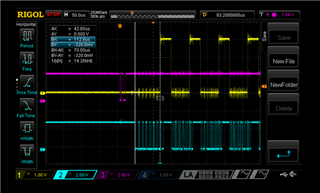
I noticed that the flow control (yellow) kicks in after 60-70 us at 1 M baud. This seems to be coincident with the internal FIFO size of 6 bytes. The BLE is not enabled in this scenario and I am using nrf_drv_uart directly (without using app_uart_fifo or app_uart or nrf_serial libraries). If flow control was not enabled, I am seeing overrun errors after 6th or 7th byte.