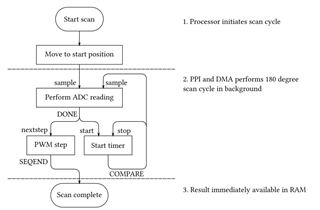
Say I have the PWM Decoder set to NRF_PWM_STEP_TRIGGERED. If I use NRF_PWM_TASK_NEXTSTEP to step through a PWM sequence, will an event be generated for each step? I would like to step a servo 5 degrees, perform ADC conversion, then repeat for a total of say 180 degrees.