
Hello guys,
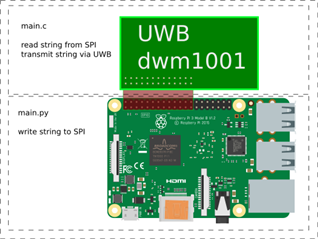
I'm having problems with communication between a dwm1001 module (from Decawave) which is a nrf52832 board, and my Raspberry 3 Pi model B.
I have connected the nrf52832 board to the Raspberry using the 26-pins header

My goal is to send/write a message from Raspberry to dwm1001 module. Inside the Raspberry I wrote a simple python script in order to write to the SPI port:
import spidev
import time
spi = spidev.SpiDev()
spi.open(0,0)
spi.mode = 0b00
while True:
data = [ 0xcc ]
resp = spi.xfer(data)
print resp
time.sleep(1)
So, now I don't know if this *is* the correct way, but I have found this in internet.
In the other side, that is the nrf52832 board, I currently implemented the C code firmware so read from SPI.
#define SPI_INSTANCE 0 /**< SPI instance index. */
static const nrf_drv_spi_t spi = NRF_DRV_SPI_INSTANCE(SPI_INSTANCE); /**< SPI instance. */
static volatile bool spi_xfer_done; /**< Flag used to indicate that SPI instance completed the transfer. */
#define TEST_STRING "Nordic"
static uint8_t m_tx_buf[] = TEST_STRING; /**< TX buffer. */
static uint8_t m_rx_buf[sizeof(TEST_STRING) + 1]; /**< RX buffer. */
static const uint8_t m_length = sizeof(m_tx_buf); /**< Transfer length. */
/**
* @brief SPI user event handler.
* @param event
*/
void spi_event_handler(nrf_drv_spi_evt_t const * p_event,
void * p_context)
{
spi_xfer_done = true;
NRF_LOG_INFO("Transfer completed.");
if (m_rx_buf[0] != 0)
{
NRF_LOG_INFO(" Received:");
NRF_LOG_HEXDUMP_INFO(m_rx_buf, strlen((const char *)m_rx_buf));
}
}
int main(void)
{
bsp_board_leds_init();
NRF_LOG_INIT(NULL);
NRF_LOG_DEFAULT_BACKENDS_INIT();
NRF_LOG_INFO("SPI example.");
/*
FROM Decawave
#define SPIS_MISO_PIN 28 // SPI MISO signal.
#define SPIS_CSN_PIN 12 // SPI CSN signal.
#define SPIS_MOSI_PIN 25 // SPI MOSI signal.
#define SPIS_SCK_PIN 29 // SPI SCK signal.
#define SPIM0_SCK_PIN 2 // SPI clock GPIO pin number.
#define SPIM0_MOSI_PIN 3 // SPI Master Out Slave In GPIO pin number.
#define SPIM0_MISO_PIN 4 // SPI Master In Slave Out GPIO pin number.
#define SPIM0_SS_PIN 5 // SPI Slave Select GPIO pin number.
#define SPIM1_SCK_PIN 16 // DWM1001 SPIM1 sck connected to DW1000
#define SPIM1_MOSI_PIN 20 // DWM1001 SPIM1 mosi connected to DW1000
#define SPIM1_MISO_PIN 18 // DWM1001 SPIM1 miso connected to DW1000
#define SPIM1_IRQ_PRIORITY APP_IRQ_PRIORITY_LOW //
#define SPIM1_SS_PIN XX // Not used with DMW1001
#define SPIM2_SCK_PIN 12 // SPI clock GPIO pin number.
#define SPIM2_MOSI_PIN 13 // SPI Master Out Slave In GPIO pin number.
#define SPIM2_MISO_PIN 14 // SPI Master In Slave Out GPIO pin number.
#define SPIM2_SS_PIN 15 // SPI Slave Select GPIO pin number.
*/
nrf_drv_spi_config_t spi_config; //= NRF_DRV_SPI_DEFAULT_CONFIG;
spi_config.ss_pin = NRF_DRV_SPI_PIN_NOT_USED; //SPI_SS_PIN;
spi_config.miso_pin = 18; //SPI_MISO_PIN;
spi_config.mosi_pin = 20; //SPI_MOSI_PIN;
spi_config.sck_pin = 16; //SPI_SCK_PIN;
spi_config.orc = 0xFF;
spi_config.frequency = NRF_DRV_SPI_FREQ_125K;
spi_config.mode = NRF_DRV_SPI_MODE_1;
spi_config.bit_order = NRF_DRV_SPI_BIT_ORDER_MSB_FIRST;
nrf_drv_spi_init(&spi, &spi_config, spi_event_handler, NULL);
while (1)
{
// Reset rx buffer and transfer done flag
memset(m_rx_buf, 0, m_length);
spi_xfer_done = false;
ret_code_t ret = nrf_drv_spi_transfer(&spi, m_tx_buf, m_length, m_rx_buf, m_length);
NRF_LOG_INFO(" Code: %d:", ret);
while (!spi_xfer_done)
{
__WFE();
}
NRF_LOG_FLUSH();
bsp_board_led_invert(BSP_BOARD_LED_0);
nrf_delay_ms(200);
}
}
But I cannot read anything. In practice I checked that the flow passes through the spi_event_handler function, but my goal is not reached.
Finally, my very final goal is the following:
Thanks in advance.

