
Hi,
We have been developing our system around nRF52840 and we are now looking closer into the real-time performance of the MCU & SDK. The scenario is simple: a signal ‘YELLOW’ is detected at pin 1.13 and the corresponding interrupt service routine toggles an LED ‘GREEN’.
- The input ISR starts executing only 20.3usecs after the external event takes place. Given the clock is at 32MHz, 20.3usecs is more than 600 instruction executions (please correct me if my calculations are wrong). Is this the expected timing performance? Is there a way to optimise the response time?
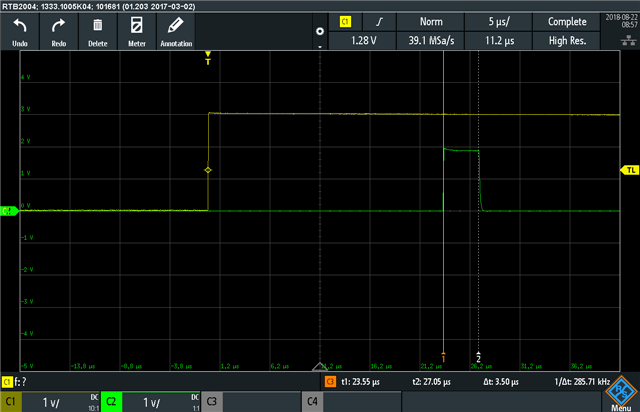
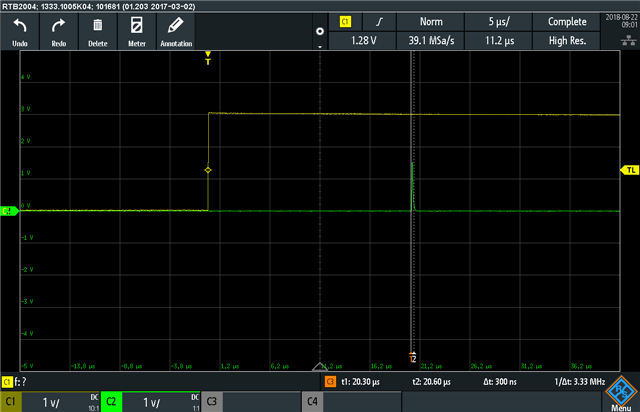
- Also, toggling the output line using NRF SDK takes 3.50usecs, while toggling the same line using OUTSET/CLR register directly takes less than 300nsecs. Again, is there a way to optimise the performance?
(SDK 15.0.0, eclipse IDE, no SoftDevice, Windows)
I would like to achieve the best performance possible without skipping or heavily modifying the Nordic SDK, since that would make very difficult to upgrade to future SDK releases.
Oscilloscope screenshots and code follow.
Toggling pin via SDK:
Toggling pin via register access:
The pins:
#define PULSEIN NRF_GPIO_PIN_MAP(1, 13)
#define LED NRF_GPIO_PIN_MAP(0, 10)
The configuration:
nrfx_gpiote_out_config_t OutLowConfig = NRFX_GPIOTE_CONFIG_OUT_SIMPLE(false);
if (nrfx_gpiote_out_init(LED, &OutLowConfig) != SUCCESS)
NRF_LOG_ERROR("Failed to initialise Debug LEDs.");
nrfx_gpiote_in_config_t inter_config= NRFX_GPIOTE_CONFIG_IN_SENSE_LOTOHI(true);
inter_config.pull = NRF_GPIO_PIN_PULLDOWN;
if (nrfx_gpiote_in_init(PULSEIN, &inter_config, AnISR) != SUCCESS)
NRF_LOG_ERROR("Failed to initialise input interrupt.");
The input interrupt service routine:
static void AnIsrTogglingViaSdk(nrfx_gpiote_pin_t pin, nrf_gpiote_polarity_t action) {
nrfx_gpiote_out_set(LED);
nrfx_gpiote_out_clear(LED);
}
static void AnIsrTogglingViaRegisters(nrfx_gpiote_pin_t pin, nrf_gpiote_polarity_t action) {
NRF_P0->OUTSET = 1 << 10;
NRF_P0->OUTCLR = 1 << 10;
}
Thank you in advance,
Christos
