
I'm learning about GPIOTE and PPI and looking at an example I come to the following code but now it act incorrectly. So as you can see I'm enabling the interrupt for GPIOTE channel 0:
NRF_GPIOTE->INTENSET = GPIOTE_INTENSET_IN0_Msk;
But when the IRQHandler is called this is what I get:
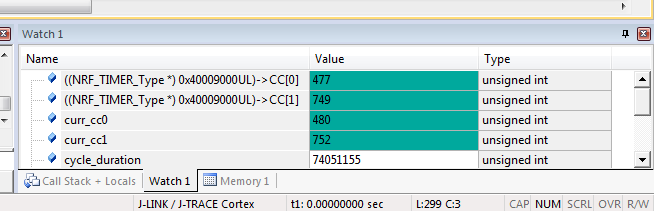
I expected CC[1] to be 0 but instead it is the value when the signal go HITOLOW!
Here is the signal I'm capturing:

CC[0] is cursor #3 (LOWTOHIGH) and CC[1] is cursor #4 (HIGHTOLOW). Timer starts to count at #2!
void GPIOTE_IRQHandler(void)
{
curr_cc1 = NRF_TIMER1->CC[1];
curr_cc0 = NRF_TIMER1->CC[0];
// Clear the event causing the interrupt.
NRF_GPIOTE->EVENTS_IN[0] = 0;
NRF_GPIOTE->EVENTS_IN[1] = 0;
NRF_TIMER1->TASKS_STOP = 1;
}
/** @brief Function for initializing the GPIO Tasks/Events peripheral.
*/
static void gpiote_init(void)
{
NVIC_EnableIRQ(GPIOTE_IRQn);
nrf_gpio_cfg_sense_input(ECHO, NRF_GPIO_PIN_NOPULL, NRF_GPIO_PIN_SENSE_LOW);
// Enable interrupt on input 1 event.
NRF_GPIOTE->INTENSET = GPIOTE_INTENSET_IN0_Msk;
// Configure GPIOTE channel 0 to generate event on input pin low-to-high transition.
nrf_gpiote_event_config(0, ECHO, NRF_GPIOTE_POLARITY_LOTOHI);
// Configure GPIOTE channel 1 to generate event on input pin high-to-low transition.
// Note that we can connect multiple GPIOTE events to a single input pin.
nrf_gpiote_event_config(1, ECHO, NRF_GPIOTE_POLARITY_HITOLO);
}
/** @brief Function for initializing the PPI peripheral.
*/
static void ppi_init(void)
{
// Configure PPI channel 0 to capture Timer 1 value into the CC[0] register.
// This is achieved when GPIOTE detects Low-to-High transition on pin INPUT_PIN_NUMBER.
NRF_PPI->CH[0].EEP = (uint32_t)&NRF_GPIOTE->EVENTS_IN[0];
NRF_PPI->CH[0].TEP = (uint32_t)&NRF_TIMER1->TASKS_CAPTURE[0];
// Configure PPI channel 1 to capture Timer 1 value into CC[1] register.
// This is achieved when GPIOTE detects High-to-Low transition on pin INPUT_PIN_NUMBER.
NRF_PPI->CH[1].EEP = (uint32_t)&NRF_GPIOTE->EVENTS_IN[1];
NRF_PPI->CH[1].TEP = (uint32_t)&NRF_TIMER1->TASKS_CAPTURE[1];
// Enable only PPI channels 0 and 1.
NRF_PPI->CHEN = (PPI_CHEN_CH0_Enabled << PPI_CHEN_CH0_Pos)
| (PPI_CHEN_CH1_Enabled << PPI_CHEN_CH1_Pos);
}

