Hi,
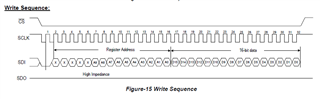
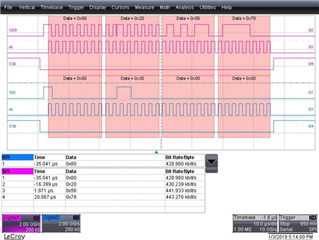
Can you please direct me to the document that explains about generating more than 8 bits of clock in SPI and keeping CS line low for that entire period.
Also, if i have to send two 16bit data, would i have to send them in lots of 8bit ? or i can send them as 16bits using nrf_drv_spi_transfer API?
I am modifying the SPI example found under SDK15/example/peripheral/spi.
And i have to achieve the sequence attached in the image.
Thank you