Hello,
Currently, I am using the SDK15.2, BLE and two nRF52 DK boards, one using SPI master, and the other being the SPI Slave, between the SPIs and SPI master I added an extra line, allowing the slave to signal the master when it has data to send using a GPIO IRQ,
so basically when the Slave has data I set the GPIO line, and the Master enters quickly in the GPIO IRQ starting a nrf_drv_spi_transfer() non-blocking pulling the data from the Slave with no issues.
my issue:
1)when I am on the situation where I require to send multiple transfers and as fast as possible I call multiple times nrf_drv_spi_transfer() from the master, but the slave is not able to receive all the transfers, it does not matter if I use a single byte, the slave is not able to process all them, if I dont use delays larger than 1ms between each nrf_drv_spi_transfer(), also if I leave uncommented the NRF_LOG_HEXDUMP_INFO all works fine ( it is in the code below and it adds some delays between each transfer too when calling NRF_LOG... functions, but I use it only for debug)
for example, multiples call to Send(buffer,buffer_size) on my master e.g
Send(buffer1,buffer1_size);
Send(buffer2,buffer2_size);
Send(buffer3,buffer3_size);
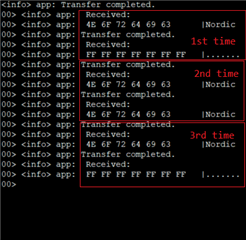
where only I am able to receive the data from buffer1 and buffer3, if I have some delays or the NRF_LOG_HEXDUMP_INFO printing, I receive the data from the 3 buffers, buffers1, buffers2, buffers3
I used an oscilloscope to check the MOSI line and it is writing the 3 buffers data, but for some reason, the slave is not receiving/processing all them, my code:
Master
void spi_event_handler(nrf_drv_spi_evt_t const * p_event, void * p_context)
{
transfer = false ; // the transfer is completed
if (m_rx_buf[0] != 0)
{
//NRF_LOG_INFO(" Receiving from Slave %d", m_rx_buf[1])
//NRF_LOG_HEXDUMP_INFO(m_rx_buf, m_rx_buf[1]);
message.data = m_rx_buf;
message.lenght = m_rx_buf[1];
event(&message); // where I process my message received from a SLAVE
}
}
void spi_setup_init()
{
nrf_drv_spi_config_t spi_config1 = NRF_DRV_SPI_DEFAULT_CONFIG;
spi_config1.ss_pin = SPI1_SS_PIN;
spi_config1.miso_pin = SPI1_MISO_PIN;
spi_config1.mosi_pin = SPI1_MOSI_PIN;
spi_config1.sck_pin = SPI1_SCK_PIN;
spi_config1.frequency = NRF_DRV_SPI_FREQ_8M;
APP_ERROR_CHECK(nrf_drv_spi_init(&spi1, &spi_config1, spi_event_handler, NULL));
}
void transmit(const uint8_t * data, uint16_t data_size)
{
while (transfer == true)
{}
transfer = true;
memset(m_rx_buf, 0, m_length);
//NRF_LOG_INFO(" Transmiting to Slave %d", data_size)
//NRF_LOG_HEXDUMP_INFO(data, data_size);
nrf_drv_spi_transfer(&spi1, data, m_length, m_rx_buf1, m_length);
nrf_delay_us(1); // I had to add this delay because I was getting corrupted the last bytes on the slave rx buffer
}
Slave
void spis_event_handler(nrf_drv_spis_event_t event)
{
if (event.evt_type == NRFX_SPIS_BUFFERS_SET_DONE)
{
nrf_drv_gpiote_out_clear(Trigger_line); // I use this to notify the master the slave has data ready to send
NRF_LOG_INFO("NRFX_SPIS_BUFFERS_SET_DONE")
}
if (event.evt_type == NRF_DRV_SPIS_XFER_DONE)
{
APP_ERROR_CHECK(nrf_drv_spis_buffers_set(&spis, m_tx_buf, m_length, m_rx_buf, m_length));
//NRF_LOG_INFO(" Received from master %d", m_rx_buf[1])
//NRF_LOG_HEXDUMP_INFO(m_rx_buf, m_rx_buf[1]);
process_message();
memset(m_rx_buf, 0, m_length);
}
}
void Initialize()
{
nrf_drv_spis_config_t spis_config;
spis_config.csn_pin = APP_SPIS_CS_PIN;
spis_config.miso_pin = APP_SPIS_MISO_PIN;
spis_config.mosi_pin = APP_SPIS_MOSI_PIN;
spis_config.sck_pin = APP_SPIS_SCK_PIN;
spis_config.mode = NRF_SPIS_MODE_0;
spis_config.bit_order = NRF_SPIS_BIT_ORDER_MSB_FIRST;
spis_config.csn_pullup = NRFX_SPIS_DEFAULT_CSN_PULLUP;
spis_config.miso_drive = NRFX_SPIS_DEFAULT_MISO_DRIVE;
spis_config.def = NRFX_SPIS_DEFAULT_DEF;
spis_config.orc = NRFX_SPIS_DEFAULT_ORC;
spis_config.irq_priority = NRFX_SPIS_DEFAULT_CONFIG_IRQ_PRIORITY;
APP_ERROR_CHECK(nrf_drv_spis_init(&spis, &spis_config, spis_event_handler));
memset(m_rx_buf, 0, m_length);
APP_ERROR_CHECK(nrf_drv_spis_buffers_set(&spis, m_tx_buf, m_length, m_rx_buf, m_length));
memset(m_tx_buf, 0, m_length);
APP_ERROR_CHECK(nrf_drv_gpiote_init());
nrf_drv_gpiote_out_config_t out_config;
out_config.init_state = NRF_GPIOTE_INITIAL_VALUE_LOW;
out_config.task_pin = false;
APP_ERROR_CHECK(nrf_drv_gpiote_out_init(Trigger_line, &out_config));
}
void Send(const uint8_t * data, uint16_t data_size)
{
memcpy(m_tx_buf, data, data_size);
if (data[0] != requestcommand) //some messages are request from the master they does not enable the Trigger_line, all others does it
{
nrf_drv_gpiote_out_set(Trigger_line);
}
//NRF_LOG_INFO(" set buffer %d [%d]", data_size, x)
//NRF_LOG_HEXDUMP_INFO(m_tx_buf, data_size);
}
2) which is the difference between SPI master and SPIM driver? does it depend on the nRF52 module in use(832 or 840)? are there some examples for SPIM Driver?
3) are there differences between SPI (clock rate, easy DMA) on nRF52832 and nRF52840?
Regards