
Hello to everyone.
I'm working with Light_switch example for nRF52832 (PCA10040) and Mesh 3.1.
I'm trying to modify the server example and to do that I need to know where (in the whole main.c code) is the part that send the server's status to client.
I know that in client, the parte is this:
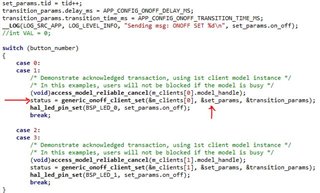
There, the code send the param "1" to make the server turn the LED 0, then when the client's message is received, it asks for an acknowledgement, the same that the server confirms with a message. Where in the server's code is sent that confirmation message?
I'm trying to learn how to send an entire byte from server to client, but first I have to learn how to send a "bit".
I hope you can help me.
Best regards,
John.

