
In my attempt of learning the nRF52 "eco system" (nRF52 DK, nRF15.3 SDK, SES and pca10040e project for nRF52810), I have combined the GATT_C, GPIO and SPI examples to make an application for streaming CAN data over BLE. CAN is a mcp2515 chip with SPI, and I use SPI with DMA to transfer data to and from the mcp2515.
Everything works fine wrt SPI. However, it seems to me that the CS goes systematically high (or with other words, the SoftDevice releases the SPI) ~15 us after last byte is transferred over the SPI bus.
My question is if there is a way to reduce the time from the SPI SCK goes inactive to the CS goes high (CS is active low on the mcp2515)? 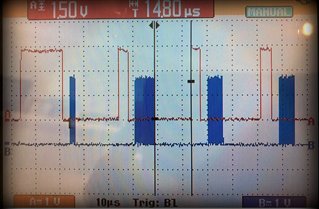
In the picture the red is the CS and the blue is the SPI SCK.


