I tried to drive MAX30003 to get ECG signals through nrf52832.
I use an analog signal instrument to give the standard ECG signals. Now,the nrf's SPI timing sequence is right, and the data I got from the MAX30003 RTOR registers(0X25) is right (HR values is similiar to the signal instrument ).But the data I read from ECG_FIFO is not true. Can I get some help?
#include <stdbool.h>
#include <stdint.h>
#include <stdio.h>
#include "app_uart.h"
#include "app_error.h"
#include "nrf_delay.h"
#include "nrf_gpio.h"
#include "boards.h"
#include "max30003.h"
#include "nrf_drv_spi.h"
#include "SEGGER_RTT.h"
#include "nrf_drv_pwm.h"
#define UART_TX_BUF_SIZE 256 /**< UART TX buffer size. */
#define UART_RX_BUF_SIZE 1 /**< UART RX buffer size. */
static nrf_drv_pwm_t m_pwm0 = NRF_DRV_PWM_INSTANCE(0);
#define APP_PWM_DEFAULT_CONFIG_1CH(period_in_us, pin)
#define USED_PWM(idx) (1UL << idx)
static uint8_t m_used = 0;
static void pwm(void)
{
nrf_drv_pwm_config_t const config0 =
{
.output_pins =
{
MAX30003_PIN_FCLK | NRF_DRV_PWM_PIN_INVERTED, // channel 0 Êä³öÒý½Å
NRF_DRV_PWM_PIN_NOT_USED, // channel 1
NRF_DRV_PWM_PIN_NOT_USED, // channel 2
NRF_DRV_PWM_PIN_NOT_USED, // channel 3
},
.irq_priority = APP_IRQ_PRIORITY_LOWEST,
.base_clock = NRF_PWM_CLK_16MHz,
.count_mode = NRF_PWM_MODE_UP,
.top_value = 256,
.load_mode = NRF_PWM_LOAD_COMMON,
.step_mode = NRF_PWM_STEP_AUTO
};
APP_ERROR_CHECK(nrf_drv_pwm_init(&m_pwm0, &config0, NULL));
m_used |= USED_PWM(0);
static uint16_t /*const*/ seq_values[] =
{
0x8000,
0,
};
nrf_pwm_sequence_t const seq =
{
.values.p_common = seq_values,
.length = NRF_PWM_VALUES_LENGTH(seq_values),
.repeats = 0,
.end_delay = 0
};
(void)nrf_drv_pwm_simple_playback(&m_pwm0, &seq, 1, NRF_DRV_PWM_FLAG_LOOP);
}
void uart_error_handle(app_uart_evt_t * p_event)
{
if (p_event->evt_type == APP_UART_COMMUNICATION_ERROR)
{
APP_ERROR_HANDLER(p_event->data.error_communication);
}
else if (p_event->evt_type == APP_UART_FIFO_ERROR)
{
APP_ERROR_HANDLER(p_event->data.error_code);
}
}
/**********************************************************************************************
* Ãè Êö : ´®¿Ú³õʼ»¯¡£²¨ÌØÂÊ=115200bps
* Èë ²Î : ÎÞ
* ·µ»ØÖµ : ÎÞ
*********************************************************************************************/
void uart_init(void)
{
uint32_t err_code;
const app_uart_comm_params_t comm_params =
{
RX_PIN_NUMBER,
TX_PIN_NUMBER,
RTS_PIN_NUMBER,
CTS_PIN_NUMBER,
APP_UART_FLOW_CONTROL_DISABLED,
false,
UART_BAUDRATE_BAUDRATE_Baud115200
};
APP_UART_FIFO_INIT(&comm_params,
UART_RX_BUF_SIZE,
UART_TX_BUF_SIZE,
uart_error_handle,
APP_IRQ_PRIORITY_LOW,
err_code);
APP_ERROR_CHECK(err_code);
}
/**********************************************************************************************
* Ãè Êö : mainº¯Êý
* Èë ²Î : ÎÞ
* ·µ»ØÖµ : ÎÞ
*********************************************************************************************/
int main(void)
{
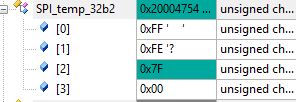
uint8_t SPI_temp_32b[4],SPI_temp_32b1[4],SPI_temp_32b2[4];
uint8_t DataPacketHeader[20];
signed long ecgdata;
unsigned long data;
uart_init();
SEGGER_RTT_ConfigUpBuffer(0, NULL, NULL, 0, SEGGER_RTT_MODE_NO_BLOCK_SKIP);
nrf_delay_ms(100);
nrf_gpio_cfg_output(MAX30003_PIN_FCLK);
pwm();
max30003_spi_init();
max30003_init();
while (true)
{
max30003_read_register(MAX30003_REGADDR_ECG_FIFO,SPI_temp_32b2);
data = (SPI_temp_32b2[0] <<16)|(SPI_temp_32b2[1] <<8)|((SPI_temp_32b2[2] >>6)&0x03);
ecgdata = (signed long) (data);
printf("%d\r\n",ecgdata);
max30003_read_register(MAX30003_REGADDR_RTOR,SPI_temp_32b);
unsigned long RTOR_msb = (unsigned long) (SPI_temp_32b[0]);
unsigned char RTOR_lsb = (unsigned char) (SPI_temp_32b[1]);
unsigned long rtor = (RTOR_msb<<8 | RTOR_lsb);
rtor = ((rtor >>2) & 0x3fff) ;
float hr = 60 /((float)rtor*0.008);
unsigned int HR = (unsigned int)hr; // type cast to int
unsigned int RR = (unsigned int)rtor*8 ; //8ms
// printf("%d\r\n",HR);
DataPacketHeader[0] = 0x0A;
DataPacketHeader[1] = 0xFA;
DataPacketHeader[2] = 0x0C;
DataPacketHeader[3] = 0;
DataPacketHeader[4] = 0x02;
DataPacketHeader[5] = ecgdata;
DataPacketHeader[6] = ecgdata>>8;
DataPacketHeader[7] = ecgdata>>16;
DataPacketHeader[8] = ecgdata>>24;
DataPacketHeader[9] = RR ;
DataPacketHeader[10] = RR >>8;
DataPacketHeader[11] = 0x00;
DataPacketHeader[12] = 0x00;
DataPacketHeader[13] = HR ;
DataPacketHeader[14] = HR >>8;
DataPacketHeader[15] = 0x00;
DataPacketHeader[16] = 0x00;
DataPacketHeader[17] = 0x00;
DataPacketHeader[18] = 0x0b;
// for(int i=0;i<19;i++)
// {app_uart_put(DataPacketHeader[i]);}
}
}
/********************************************END FILE*******************************************/


 Fig 1
Fig 1  Fig 2
Fig 2 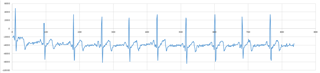 Fig 3
Fig 3