Hi friend,
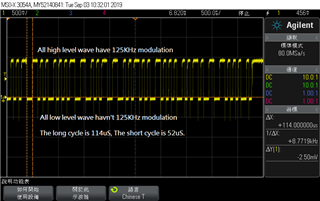
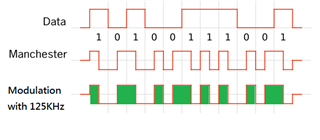
We have a project with BLE connection. It sends out the Manchester data and the data modulates with 125KHz. Can we use PWM to do that? Will the data format be disturbed by BLE? Can I increase the priority to avoid the data format being disturbed? Could anyone guide how to do that? The long cycle is 114 uS and the short cycle is 52 uS.
Best wishes
Ted Wu