Hello,
I am working on an IoT project using the Thingy 91 to send sensor data via Bluetooth to a remote device. Currently, I am trying to set up a simple beacon as shown in the Zephyr samples. I would like to set up the NRF9160 as the host and the NRF52 as the controller.
Therefore, I used the LTE/BLE example in the NRF samples and flashed the NRF52 with the patched HCI/UART sample provided in this post.
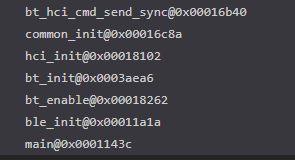
However, the system keeps crashing during HCI setup (in bt_enable). The error is due to a failing k_sem_take call (return value -11) in Zephyr's hci_core.c.
Is there some issue with the driver setup?
Best regards
Nils Ruf