
Hi,
I've built a project out of the USBD_ACM_CDC example in which I have added a SPI master driver. This project has a timer interrupt that will shoot off every ~500us and trigger a 520 bit SPI transfer. The received packets undergo *very* minor processing and are spit out over USB to my host computer.
So it seems like I'm getting all the packets I expect, only I'm also getting 6 extra invalid packets with every valid packet. Here's a screenshot of my terminal from when I'm just transferring a hex counter:
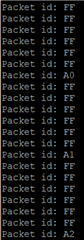
The counter is incrementing so those bits are all fine. As you can see there are consistently 6 extra invalid packets (the FFs). If I slow down how often I shoot off SPI transfers, these invalid packets will disappear, but that doesn't make too much sense. Right now it seems like the SPI handler is being called erroneously. Does anyone have insight into where these are coming from? I looked at the SPI wires with an oscope and couldn't see any issues.
