Hi,
I'm using the light switch example and lpn example from the Mesh SDK 4.1.0.
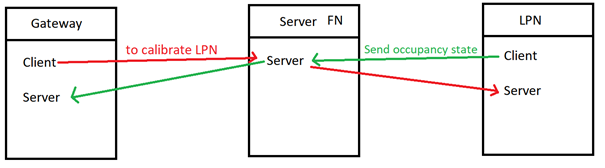
I have one Board as the light switch client (gateway), one as the light switch server (FN) and one lpn.
Provisioning is done with the Mesh app for android.
the lpn node will later be modified to act as a sensor to measure a distance and when the distance is lower than 1m, it will send a message to the gateway, similar to a button press.
The ideal is to have 50 lpn nodes which regularly send the on/off message (distance lower/higher than 1m) to the gateway.
However, i need to be able to send a constant to every LPN seperately to calibrate my sensors.
How can I do this?
I had the LPN/FN set to subscribe to group address C000 and the gateway/LPN to publish to C000. This is how the example is supposed to work and so it does, but if i want to change the led1 of a specific LPN, i can't just send a message because it would change the message of every LPN in that group address. Also, As I can see, the LPN is behaving as a client, is it even possible in this lpn example to send data to the LPN?
Do I have to create a new model and then send data over the new model and change publication address of that new model every time? and how do I change the publication address by software?
Thank you