
Hi. I'm developing IMU system for multiple purpose using ICM20948 & nRF52832.
But there are problems on TWI communications when using BLE simultaneously.
If not use BLE, all the data comes from IMU sensor is pretty well as shown below:
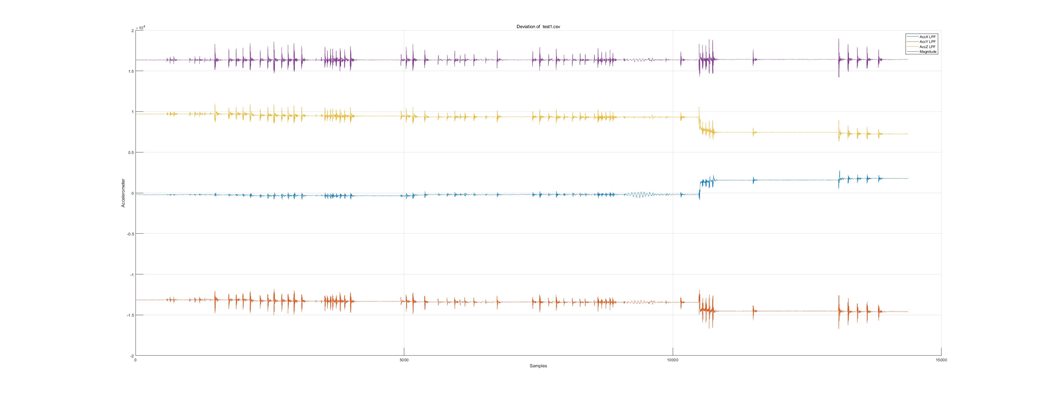
Small deviation is deliberate data for test purpose.
But after enable BLE, wrong data comes out from ICM20948 sensor as below. It is connected with TWI lines.
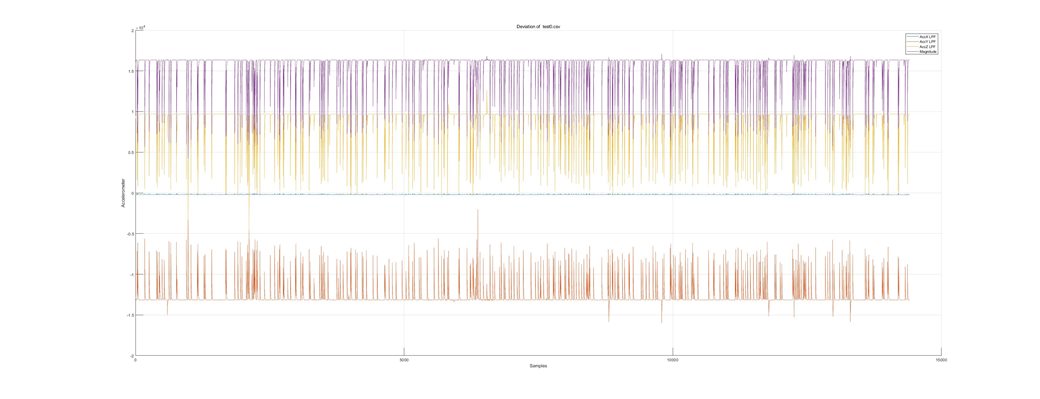
Only X-Axis are normal data. I attached source codes which get or send data to ICM20948 sensor.
/* * Roverdyn I2C(TWI) Library * Created at Jan. 14, 2020 * Author : Seonguk Jeong * Copyright to 2019 Seonguk Jeong. All rights reserved. * Contact : [email protected] */ #include "Wire.h" void _Wire::begin(){ // I2C 통신을 활성화 시키는 함수 // 기본 통신 속도는 400kHz // 기본 설정 핀 : SCL(12번), SDA(11번) // 설정 핀은 Wire.h 에서 바꿀 수 있음 // I2C 통신 비활성화 NRF_TWI0->ENABLE = 0; // SCL/SDA핀 설정 NRF_TWI0->PSELSCL = pinSCL; NRF_TWI0->PSELSDA = pinSDA; // 통신 주파수 설정(400kHz) NRF_TWI0->FREQUENCY = 0x06680000; // 인터럽트 비활성화 NRF_TWI0->INTENCLR = 0x044286; // I2C 통신 활성화 NRF_TWI0->ENABLE = 5; // 이벤트 초기화 NRF_TWI0->EVENTS_RXDREADY = 0; NRF_TWI0->EVENTS_TXDSENT = 0; } uint8_t _Wire::requestFrom(uint8_t address, uint8_t bytes){ // Slave device로부터 데이터를 요청하는 함수 uint8_t recvLength = 0; // 통신 주소 및 Read 신호 송신 NRF_TWI0->ADDRESS = address; NRF_TWI0->TASKS_STARTRX = 1; for(uint8_t i=0;i<bytes;i++){ // Byte Boundary 이벤트 확인 while(!NRF_TWI0->EVENTS_BB){} NRF_TWI0->EVENTS_BB = 0; // 마지막 데이터가 오면 STOP if(i == (bytes - 1)){ NRF_TWI0->TASKS_STOP = 1; } // 데이터 읽기 while(!NRF_TWI0->EVENTS_RXDREADY){} NRF_TWI0->EVENTS_RXDREADY = 0; rxBuffer[i] = NRF_TWI0->RXD; } return recvLength; } void _Wire::beginTransmission(uint8_t address){ // TWI 데이터 전송을 시작하는 함수 NRF_TWI0->ENABLE = 5; NRF_TWI0->ADDRESS = address; NRF_TWI0->TASKS_STARTTX = 1; memset(&rCount, 0x00, sizeof(rCount)); memset(&rxBuffer, 0x00, sizeof(rxBuffer)); rCount = 0; } uint8_t _Wire::endTransmission(bool toggle){ // TWI 통신 종료 함수 uint8_t err_code = 0; if(toggle){ if(!NRF_TWI0->EVENTS_STOPPED){NRF_TWI0->TASKS_STOP = 1;} while(!NRF_TWI0->EVENTS_STOPPED){} NRF_TWI0->EVENTS_STOPPED = 0; err_code = 1; } NRF_TWI0->ENABLE = 0; return err_code; } uint8_t _Wire::write(uint8_t data){ NRF_TWI0->TXD = data; while(!NRF_TWI0->EVENTS_TXDSENT){} NRF_TWI0->EVENTS_TXDSENT = 0; return 0; } uint8_t _Wire::available(){ return 0; } uint8_t _Wire::read(){ static uint8_t output = 0; output = rxBuffer[rCount]; rCount++; return output; } void _Wire::setClock(uint32_t frequency){ // I2C 통신 속도를 설정하는 함수 // 별도로 함수를 호출하지 않을 경우 400kHz로 동작 switch(frequency){ case 100000: // 100Khz로 설정 시 NRF_TWI1->FREQUENCY = 0x01980000; break; case 250000: // 250Khz로 설정 시 NRF_TWI1->FREQUENCY = 0x04000000; break; case 400000: // 400Khz로 설정 시 NRF_TWI1->FREQUENCY = 0x06680000; break; default: NRF_TWI1->FREQUENCY = 0x06680000; break; } }
/* * Roverdyn UART Library * Created at Mar. 6, 2020 * Author : Seonguk Jeong * Copyright to 2020 Seonguk Jeong. All rights reserved. * Contact : [email protected] */ #include "ICM20948.h" #include <SEGGER_RTT.h> _Wire Wire; extern _Serial Serial; uint8_t _ICM20948::Init(){ uint8_t err_code = 0; // TWI 통신 초기화 및 시작 Wire.begin(); // ICM20948 초기화 writeData(DEVICE_ID, REG_BANK_SEL, 0x00); writeData(DEVICE_ID, PWR_MGMT_1, 0x80); nrf_delay_ms(100); writeData(DEVICE_ID, PWR_MGMT_1, 0x01); writeData(DEVICE_ID, PWR_MGMT_2, 0x00); // 바이패스 모드 설정 writeData(DEVICE_ID, INT_PIN_CFG, (0x01 << 1)); // Device ID 읽기 // 제대로 연결이 되어 있지 않으면 0x01(에러)를 리턴 if(getDeviceId() != 234){ return ROVERDYN_ERROR_NO_DATA; } if(getMagId() != 0x09){ return ROVERDYN_ERROR_NO_DATA; } /* // Sample rate writeData(DEVICE_ID, REG_BANK_SEL, 0x02); writeData(DEVICE_ID, GYRO_SMPLRT_DIV, 0x01); writeData(DEVICE_ID, ACCEL_SMPLRT_DIV_2, 0x01); */ // 자이로스코프 설정 setCfgGyro(DLPF_GYRO_6HZ, GYRO_RANGE_1000DPS, GYRO_AVG_1X, true); // 가속도 센서 설정 setCfgAcc(DLPF_ACC_6HZ, ACCEL_RANGE_2G, ACCEL_AVG_4X, true); // 지자기 센서 설정 setMagMode(MAG_CONTINUOUS_MODE2); // 온도 센서 설정 setCfgTemp(TEMP_DLPF_34HZ); return err_code; } uint8_t _ICM20948::writeData(uint8_t device, uint8_t addr, uint8_t data){ // 레지스터에 값을 쓰는 함수 uint8_t err_code = 0; // 통신 시작 Wire.beginTransmission(device); Wire.write(addr); Wire.write(data); Wire.endTransmission(true); return err_code; } uint8_t _ICM20948::getDeviceId(){ // Who AM I 레지스터로부터 데이터를 읽어오는 함수 uint8_t output = 0; Wire.beginTransmission(DEVICE_ID); Wire.write(WHO_AM_I); Wire.requestFrom(DEVICE_ID, 1); output = Wire.read(); Wire.endTransmission(true); if(output != 234){ return ROVERDYN_ERROR_NO_DATA; } return output; } uint8_t _ICM20948::getMagId(){ // 지자기 센서의 WIA 레지스터로부터 데이터를 읽어오는 함수 uint8_t output = 0; // Get Data Wire.beginTransmission(AK09916); Wire.write(WIA2); Wire.requestFrom(AK09916, 1); output = Wire.read(); Wire.endTransmission(true); return output; } uint8_t _ICM20948::setCfgAcc(uint8_t ACCEL_DLPF_SEL, uint8_t ACCEL_FS_SEL, uint8_t ACCEL_AVG_SEL, bool Fchoice_b){ // 가속도 센서의 측정 범위와 DLPF 적용 유무 설정 함수 uint8_t err_code = 0; // Select Bank writeData(DEVICE_ID, REG_BANK_SEL, 0x20); // Set Accel Config 1 uint8_t data = (ACCEL_DLPF_SEL << 3) | (ACCEL_FS_SEL << 1) | (Fchoice_b); writeData(DEVICE_ID, ACCEL_CONFIG, data); // Set Accel Config 2 writeData(DEVICE_ID, ACCEL_CONFIG_2, ACCEL_FS_SEL); // Select Bank writeData(DEVICE_ID, REG_BANK_SEL, 0x00); return err_code; } uint8_t _ICM20948::setCfgGyro(uint8_t GYRO_DLPF_SEL, uint8_t GYRO_FS_SEL, uint8_t GYRO_AVG_SEL, bool Fchoice_b){ // 자이로스코프의 측정 범위와 DLPF 적용 유무 설정 함수 uint8_t err_code = 0; // Select Bank writeData(DEVICE_ID, REG_BANK_SEL, 0x20); // Set Gyro Config 1 uint8_t data = (GYRO_DLPF_SEL << 3) | (GYRO_FS_SEL << 1) | (Fchoice_b); writeData(DEVICE_ID, GYRO_CONFIG_1, data); // Set Gyro Config 2 writeData(DEVICE_ID, GYRO_CONFIG_2, GYRO_AVG_SEL); // Select Bank writeData(DEVICE_ID, REG_BANK_SEL, 0x00); return err_code; } uint8_t _ICM20948::setCfgTemp(uint8_t TEMP_DLPF_SET){ // 온도 센서의 DLPF 설정 uint8_t err_code = 0; // Select Bank writeData(DEVICE_ID, REG_BANK_SEL, 0x20); // Set DLPF writeData(DEVICE_ID, TEMP_CONFIG, TEMP_DLPF_SET); // Select Bank writeData(DEVICE_ID, REG_BANK_SEL, 0x00); return err_code; } uint8_t _ICM20948::setMagMode(uint8_t MODE){ // 지자기 센서 설정 함수 uint8_t err_code = 0; // Mode 설정 writeData(AK09916, CNTL2, MODE); return err_code; } int16_t* _ICM20948::getMagASA(){ // 지자기 센서 ASA 데이터 읽기 함수 static int16_t output[3]; return output; } int16_t* _ICM20948::getRawAcc(){ // 가속도 센서 Raw 데이터 읽기 함수 static int16_t output[3] = {0}; // Select Bank writeData(DEVICE_ID, REG_BANK_SEL, 0x00); // Get Data Wire.beginTransmission(DEVICE_ID); Wire.write(ACCEL_XOUT_H); Wire.requestFrom(DEVICE_ID, 6); for(uint8_t i=0;i<3;i++){ output[i] = Wire.read() << 8 | Wire.read(); } Wire.endTransmission(true); return output; } int16_t* _ICM20948::getRawGyro(){ // 자이로스코프 Raw 데이터 읽기 함수 static int16_t output[3] = {0}; // Select Bank writeData(DEVICE_ID, REG_BANK_SEL, 0x00); // Get Data Wire.beginTransmission(DEVICE_ID); Wire.write(GYRO_XOUT_H); Wire.requestFrom(DEVICE_ID, 6); for(uint8_t i=0;i<3;i++){ output[i] = Wire.read() << 8 | Wire.read(); } Wire.endTransmission(true); return output; } int16_t* _ICM20948::getRawMag(){ // 지자기 센서 Raw 데이터 취득 함수 static int16_t output[3] = {0}; // Select Bank writeData(DEVICE_ID, REG_BANK_SEL, 0x00); // Get Data Wire.beginTransmission(AK09916); Wire.write(ST1); Wire.requestFrom(AK09916, 1); bool st1 = Wire.read() & 0x01; Wire.endTransmission(true); if(st1){ // Read Mag Data Wire.beginTransmission(AK09916); Wire.write(HXL); Wire.requestFrom(AK09916, 6); for(uint8_t i=0;i<3;i++){ output[i] = Wire.read(); output[i] = (Wire.read() << 8) | output[i]; } Wire.endTransmission(true); // Read ST2 register Wire.beginTransmission(AK09916); Wire.write(ST2); Wire.requestFrom(AK09916, 1); bool st2 = (Wire.read() >> 3) & 0x01; if(st2){ return 0; } Wire.endTransmission(true); } return output; } float _ICM20948::getTemp(float TEMP_OFFSET){ // 온도 데이터 수신 함수 float output = 0; SEGGER_RTT_printf(0, "TEST\n"); // Select Bank writeData(DEVICE_ID, REG_BANK_SEL, 0x00); // Get Data Wire.beginTransmission(DEVICE_ID); Wire.write(TEMP_OUT_H); Wire.requestFrom(DEVICE_ID, 2); output = Wire.read() << 8 | Wire.read(); Wire.endTransmission(true); // 측정한 데이터를 Degree 단위로 변환 output = ((output - TEMP_OFFSET)/TEMP_SENSITIVITY) + 21.0f; return output; } uint8_t _ICM20948::calibrateAccel(){ // 가속도 센서 보정 함수 uint8_t err_code = 0; uint16_t count = 0, itinary = 2000; int16_t avg[3] = {0}, accOffsetDefault[3] = {0}; // Low 레지스터 1번 비트 받아옴 // Select Bank writeData(DEVICE_ID, REG_BANK_SEL, 0x10); // Get Data for(uint8_t i=0;i<3;i++){ Wire.beginTransmission(DEVICE_ID); Wire.write(XA_OFFS_H + i); Wire.requestFrom(DEVICE_ID, 2); accOffsetDefault[i] = Wire.read() << 8 | Wire.read(); Wire.endTransmission(true); } // 초기값 평가 int16_t *ACCEL; do{ ACCEL = getRawAcc(); count++; for(uint8_t i=0;i<3;i++){ avg[i] = (float)((float)( (float)(count - 1)/(float)count ) * (float)avg[i - 1]) + ((float)((float)ACCEL[i] / count)); } }while(count <= itinary); while(1){ } return err_code; } uint8_t _ICM20948::calibrateGyro(){ // 자이로스코프 보정 함수 uint8_t err_code = 0; return err_code; } uint8_t _ICM20948::calibrateMag(){ // 지자기센서 보정 함수 uint8_t err_code = 0; return err_code; }
Please check it.
Thank you.

