
Hello,
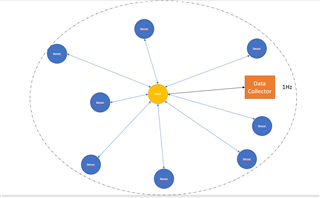
I would like to create a mesh application with different nodes that are gyroscopic and pressure sensor in a 10+- meters radius area and provide the data from the sensors node to a Raspberry collector at 1Hz.
Im using Several NRF52832 Devloppement Board, SDK 16.0 and SDK Mesh 4.0
Here are different question :
1) Is it relevent to use the Mesh SDK ?
2) Are there any model that match sensor application to send "large" data ?
3) What is the comsuption in power of a basic node that transmit data ? (And the standard consumption of a friend node using Low Power node ?)
4) IS it better to create mutliple server node and one client node OR Control model ( both server and client ) acordingly to mesh spec. ?

