Hello,
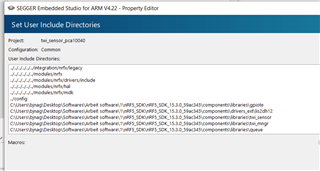
Im trying to interface LIS3DH with nRF52DK referring this example https://devzone.nordicsemi.com/f/nordic-q-a/34710/lis2dh12-driver-issue-in-nrf-sdk-v15-0.
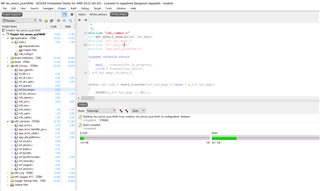
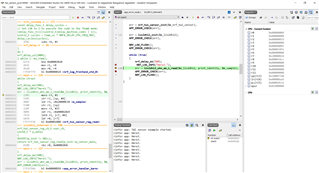
Im getting the following result, the control doesnt enter "print_identity " function and the results are as follows,
Can you help me find out how to read the values of acceleration with this code and interpret the value read?
/**
* Copyright (c) 2015 - 2018, Nordic Semiconductor ASA
*
* All rights reserved.
*
* Redistribution and use in source and binary forms, with or without modification,
* are permitted provided that the following conditions are met:
*
* 1. Redistributions of source code must retain the above copyright notice, this
* list of conditions and the following disclaimer.
*
* 2. Redistributions in binary form, except as embedded into a Nordic
* Semiconductor ASA integrated circuit in a product or a software update for
* such product, must reproduce the above copyright notice, this list of
* conditions and the following disclaimer in the documentation and/or other
* materials provided with the distribution.
*
* 3. Neither the name of Nordic Semiconductor ASA nor the names of its
* contributors may be used to endorse or promote products derived from this
* software without specific prior written permission.
*
* 4. This software, with or without modification, must only be used with a
* Nordic Semiconductor ASA integrated circuit.
*
* 5. Any software provided in binary form under this license must not be reverse
* engineered, decompiled, modified and/or disassembled.
*
* THIS SOFTWARE IS PROVIDED BY NORDIC SEMICONDUCTOR ASA "AS IS" AND ANY EXPRESS
* OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES
* OF MERCHANTABILITY, NONINFRINGEMENT, AND FITNESS FOR A PARTICULAR PURPOSE ARE
* DISCLAIMED. IN NO EVENT SHALL NORDIC SEMICONDUCTOR ASA OR CONTRIBUTORS BE
* LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR
* CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE
* GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION)
* HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
* LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT
* OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*
*/
/** @file
* @defgroup tw_sensor_example main.c
* @{
* @ingroup nrf_twi_example
* @brief TWI Sensor Example main file.
*
* This file contains the source code for a sample application using TWI.
*
*/
#include <stdio.h>
#include "boards.h"
#include "app_util_platform.h"
#include "app_error.h"
#include "nrf_drv_twi.h"
#include "nrf_delay.h"
#include "app_gpiote.h"
#include "nrf_log.h"
#include "nrf_log_ctrl.h"
#include "nrf_log_default_backends.h"
#include "lis2dh12.h"
#include "nrf_twi_mngr.h"
/* TWI instance ID. */
#define TWI_INSTANCE_ID 0
#define MAX_PENDING_TRANSACTIONS 33
#define LIS2DH12_MIN_QUEUE_SIZE 32
NRF_TWI_MNGR_DEF(m_nrf_twi_mngr, MAX_PENDING_TRANSACTIONS, TWI_INSTANCE_ID);
NRF_TWI_SENSOR_DEF(m_nrf_twi_sensor, &m_nrf_twi_mngr, LIS2DH12_MIN_QUEUE_SIZE);
LIS2DH12_INSTANCE_DEF(m_lis2dh12, &m_nrf_twi_sensor, LIS2DH12_BASE_ADDRESS_LOW);
static uint8_t m_sample = 0;
void print_identity(ret_code_t r, void *p_register_data)
{
NRF_LOG_INFO("Identity: %d", *((uint8_t *)p_register_data));
}
/**
* @brief Function for main application entry.
*/
int main(void)
{
uint32_t err;
nrf_drv_twi_config_t const config = {
.scl = 27,
.sda = 26,
.frequency = NRF_DRV_TWI_FREQ_100K,
.interrupt_priority = APP_IRQ_PRIORITY_LOWEST,
.clear_bus_init = false
};
APP_ERROR_CHECK(NRF_LOG_INIT(NULL));
NRF_LOG_DEFAULT_BACKENDS_INIT();
NRF_LOG_INFO("TWI sensor example started.");
NRF_LOG_FLUSH();
err = nrf_twi_mngr_init(&m_nrf_twi_mngr, &config);
APP_ERROR_CHECK(err);
err = nrf_twi_sensor_init(&m_nrf_twi_sensor);
APP_ERROR_CHECK(err);
err = lis2dh12_init(&m_lis2dh12);
APP_ERROR_CHECK(err);
NRF_LOG_FLUSH();
APP_ERROR_CHECK(err);
while (true)
{
nrf_delay_ms(500);
NRF_LOG_INFO("Here3.");
err = lis2dh12_who_am_i_read(&m_lis2dh12, print_identity, &m_sample);
APP_ERROR_CHECK(err);
NRF_LOG_FLUSH();
}
}
/**
* Copyright (c) 2017 - 2019, Nordic Semiconductor ASA
*
* All rights reserved.
*
* Redistribution and use in source and binary forms, with or without modification,
* are permitted provided that the following conditions are met:
*
* 1. Redistributions of source code must retain the above copyright notice, this
* list of conditions and the following disclaimer.
*
* 2. Redistributions in binary form, except as embedded into a Nordic
* Semiconductor ASA integrated circuit in a product or a software update for
* such product, must reproduce the above copyright notice, this list of
* conditions and the following disclaimer in the documentation and/or other
* materials provided with the distribution.
*
* 3. Neither the name of Nordic Semiconductor ASA nor the names of its
* contributors may be used to endorse or promote products derived from this
* software without specific prior written permission.
*
* 4. This software, with or without modification, must only be used with a
* Nordic Semiconductor ASA integrated circuit.
*
* 5. Any software provided in binary form under this license must not be reverse
* engineered, decompiled, modified and/or disassembled.
*
* THIS SOFTWARE IS PROVIDED BY NORDIC SEMICONDUCTOR ASA "AS IS" AND ANY EXPRESS
* OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES
* OF MERCHANTABILITY, NONINFRINGEMENT, AND FITNESS FOR A PARTICULAR PURPOSE ARE
* DISCLAIMED. IN NO EVENT SHALL NORDIC SEMICONDUCTOR ASA OR CONTRIBUTORS BE
* LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR
* CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE
* GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION)
* HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
* LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT
* OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*
*/
#include "lis2dh12.h"
#define RETURN_IF_ERR(err) \
if (err != NRF_SUCCESS) \
{ \
return err; \
}
ret_code_t lis2dh12_init(lis2dh12_instance_t * p_inst)
{
ASSERT(p_inst != NULL);
memset(&p_inst->temp_cfg, 0, &p_inst->act_dur - &p_inst->temp_cfg);
p_inst->ctrl0 = LIS2DH12_CTRL_REG0_VALID_SET;
p_inst->ctrl1 = 0x07;
p_inst->ctrl4 = 0x80;
return lis2dh12_cfg_commit(p_inst);
}
ret_code_t lis2dh12_cfg_commit(lis2dh12_instance_t * p_inst)
{
ASSERT(p_inst != NULL);
ret_code_t err;
p_inst->ctrl0 &= ~LIS2DH12_CTRL_REG0_VALID_MASK;
p_inst->ctrl0 |= LIS2DH12_CTRL_REG0_VALID_SET;
uint8_t ctrl_msg[] = {
LIS2DH12_REG_CTRL_REG0 | LIS2DH12_AUTO_INCR_MASK,
p_inst->ctrl0,
p_inst->temp_cfg,
p_inst->ctrl1,
p_inst->ctrl2,
p_inst->ctrl3,
p_inst->ctrl4,
p_inst->ctrl5,
p_inst->ctrl6,
p_inst->reference
};
err = nrf_twi_sensor_write(p_inst->p_sensor_data,
p_inst->sensor_addr,
ctrl_msg,
ARRAY_SIZE(ctrl_msg),
true);
RETURN_IF_ERR(err);
uint8_t fifo_msg[] = {
LIS2DH12_REG_FIFO_CTRL | LIS2DH12_AUTO_INCR_MASK,
p_inst->fifo_ctrl,
0,
p_inst->int1_cfg,
0,
p_inst->int1_ths,
p_inst->int1_dur,
p_inst->int2_cfg,
0,
p_inst->int2_ths,
p_inst->int2_dur,
p_inst->click_cfg
};
err = nrf_twi_sensor_write(p_inst->p_sensor_data,
p_inst->sensor_addr,
fifo_msg,
ARRAY_SIZE(fifo_msg),
true);
RETURN_IF_ERR(err);
uint8_t time_msg[] = {
LIS2DH12_REG_CLICK_THS | LIS2DH12_AUTO_INCR_MASK,
p_inst->click_ths,
p_inst->time_lim,
p_inst->latency,
p_inst->time_win,
p_inst->act_ths,
p_inst->act_dur
};
err = nrf_twi_sensor_write(p_inst->p_sensor_data,
p_inst->sensor_addr,
time_msg,
ARRAY_SIZE(time_msg),
true);
return err;
}
ret_code_t lis2dh12_data_read(lis2dh12_instance_t * p_inst,
lis2dh12_data_cb_t user_cb,
lis2dh12_data_t * p_data,
uint8_t samples)
{
ASSERT(p_inst != NULL);
return nrf_twi_sensor_reg_read(p_inst->p_sensor_data,
p_inst->sensor_addr,
LIS2DH12_REG_OUT_X_L | LIS2DH12_AUTO_INCR_MASK,
(nrf_twi_sensor_reg_cb_t) user_cb,
(uint8_t *) p_data,
samples * LIS2DH12_BYTES_PER_SAMPLE);
}
ret_code_t lis2dh12_temp_enable(lis2dh12_instance_t * p_inst, bool temp_en)
{
ASSERT(p_inst != NULL);
if (temp_en == true)
{
NRF_TWI_SENSOR_REG_SET(p_inst->temp_cfg, LIS2DH12_TEMP_EN_MASK, LIS2DH12_TEMP_EN_POS, 3);
}
else
{
NRF_TWI_SENSOR_REG_SET(p_inst->temp_cfg, LIS2DH12_TEMP_EN_MASK, LIS2DH12_TEMP_EN_POS, 0);
}
uint8_t send_msg[] = {
LIS2DH12_REG_TEMP_CFG_REG,
p_inst->temp_cfg
};
return nrf_twi_sensor_write(p_inst->p_sensor_data,
p_inst->sensor_addr,
send_msg,
ARRAY_SIZE(send_msg),
true);
}
ret_code_t lis2dh12_temp_read(lis2dh12_instance_t * p_inst,
lis2dh12_temp_cb_t user_cb,
int16_t * p_temp)
{
ASSERT(p_inst != NULL);
return nrf_twi_sensor_reg_read(p_inst->p_sensor_data,
p_inst->sensor_addr,
LIS2DH12_REG_OUT_TEMP_L | LIS2DH12_AUTO_INCR_MASK,
(nrf_twi_sensor_reg_cb_t) user_cb,
(uint8_t *) p_temp,
LIS2DH12_BYTES_PER_TEMP);
}