Hi, I am creating custom ble service.there i need to perform
1. character - READ , NOTIF
2. character - WRITE READ
3. character - READ,WRITE, NOTIF
I achieved - WRITE. but i am unable to read the response
Here i upload the example code that i have used.
IF THE BUTTON PRESSED value 0x01 . if released 0x00.
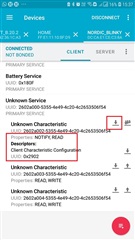
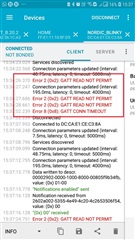
when the NOTIF enabled it works perfect. but when i want to read the current data if the notif in disabled it shows " ERROR 2 : GATT READ NOT PERMITTED "
static void on_connect(ble_uis_t * p_uis, ble_evt_t const * p_ble_evt)
{
p_uis->conn_handle = p_ble_evt->evt.gap_evt.conn_handle;
}
static void on_disconnect(ble_uis_t * p_uis, ble_evt_t const * p_ble_evt)
{
UNUSED_PARAMETER(p_ble_evt);
p_uis->conn_handle = BLE_CONN_HANDLE_INVALID;
}
static void on_write(ble_uis_t * p_uis, ble_evt_t const * p_ble_evt)
{
ble_gatts_evt_write_t const * p_evt_write = &p_ble_evt->evt.gatts_evt.params.write;
if ( (p_evt_write->handle == p_uis->button_char_handles.cccd_handle) &&
(p_evt_write->len == 2) )
{
ble_device_evt_t evt;
if (ble_srv_is_notification_enabled(p_evt_write->data))
{
p_uis->is_button_notif_enabled = true;
evt.evt_type = BLE_DEVICE_EVT_NOTIFICATION_ENABLED;
}
else
{
p_uis->is_button_notif_enabled = false;
evt.evt_type = BLE_DEVICE_EVT_NOTIFICATION_DISABLED;
}
evt.conn_handle = p_ble_evt->evt.gatts_evt.conn_handle;
p_uis->evt_handler(p_uis, &evt);
}
else
{
// Do Nothing. This event is not relevant for this service.
}
}
void ble_uis_on_ble_evt(ble_evt_t const * p_ble_evt, void * p_context)
{
ble_uis_t * p_uis = (ble_uis_t *) p_context;
if ((p_uis == NULL) || (p_ble_evt == NULL))
{
return;
}
switch (p_ble_evt->header.evt_id)
{
case BLE_GAP_EVT_CONNECTED:
on_connect(p_uis, p_ble_evt);
NRF_LOG_INFO("BLE UI connected\r\n");
break;
case BLE_GAP_EVT_DISCONNECTED:
on_disconnect(p_uis, p_ble_evt);
break;
case BLE_GATTS_EVT_WRITE:
on_write(p_uis, p_ble_evt);
break;
case BLE_GATTS_EVT_RW_AUTHORIZE_REQUEST:
on_authorize_req(p_uis, p_ble_evt);
break;
default:
// No implementation needed.
break;
}
}
static uint32_t button_char_add(ble_uis_t * p_uis, const ble_uis_init_t * p_uis_init)
{
ble_gatts_char_md_t char_md;
ble_gatts_attr_md_t cccd_md;
ble_gatts_attr_t attr_char_value;
ble_uuid_t ble_uuid;
ble_gatts_attr_md_t attr_md;
uint8_t init_value = 0;
init_value = p_uis_init->charge;
memset(&cccd_md, 0, sizeof(cccd_md));
BLE_GAP_CONN_SEC_MODE_SET_OPEN(&cccd_md.read_perm);
BLE_GAP_CONN_SEC_MODE_SET_OPEN(&cccd_md.write_perm);
cccd_md.vloc = BLE_GATTS_VLOC_STACK;
memset(&char_md, 0, sizeof(char_md));
char_md.char_props.read = 1;
// char_md.char_props.write = 1;
char_md.char_props.notify = 1;
char_md.p_char_user_desc = NULL;
char_md.p_char_pf = NULL;
char_md.p_user_desc_md = NULL;
char_md.p_cccd_md = &cccd_md;
char_md.p_sccd_md = NULL;
ble_uuid.type = p_uis->uuid_type;
ble_uuid.uuid = BLE_CHARGE_CHAR;
memset(&attr_md, 0, sizeof(attr_md));
BLE_GAP_CONN_SEC_MODE_SET_NO_ACCESS(&attr_md.read_perm);
BLE_GAP_CONN_SEC_MODE_SET_NO_ACCESS(&attr_md.write_perm);
attr_md.vloc = BLE_GATTS_VLOC_STACK;
attr_md.rd_auth = 0;
attr_md.wr_auth = 0;
attr_md.vlen = 0;
memset(&attr_char_value, 0, sizeof(attr_char_value));
attr_char_value.p_uuid = &ble_uuid;
attr_char_value.p_attr_md = &attr_md;
attr_char_value.init_len = sizeof(uint8_t);
attr_char_value.init_offs = 0;
attr_char_value.max_len = sizeof(uint8_t);
attr_char_value.p_value = ((uint8_t *)(&init_value));
return sd_ble_gatts_characteristic_add(p_uis->service_handle,
&char_md,
&attr_char_value,
&p_uis->button_char_handles);
}
static uint32_t led_char_add(ble_uis_t * p_uis, const ble_uis_init_t * p_uis_init)
{
ble_gatts_char_md_t char_md;
ble_gatts_attr_t attr_char_value;
ble_uuid_t ble_uuid;
ble_gatts_attr_md_t attr_md;
memset(&char_md, 0, sizeof(char_md));
char_md.char_props.read = 1;
char_md.char_props.write = 1;
char_md.p_char_user_desc = NULL;
char_md.p_char_pf = NULL;
char_md.p_user_desc_md = NULL;
char_md.p_cccd_md = NULL;
char_md.p_sccd_md = NULL;
ble_uuid.type = p_uis->uuid_type;
ble_uuid.uuid = BLE_LED_CONFIG_CHAR;
memset(&attr_md, 0, sizeof(attr_md));
BLE_GAP_CONN_SEC_MODE_SET_OPEN(&attr_md.read_perm);
BLE_GAP_CONN_SEC_MODE_SET_OPEN(&attr_md.write_perm);
attr_md.vloc = BLE_GATTS_VLOC_STACK;
attr_md.rd_auth = 0;
attr_md.wr_auth = 1;
attr_md.vlen = 0;
memset(&attr_char_value, 0, sizeof(attr_char_value));
attr_char_value.p_uuid = &ble_uuid;
attr_char_value.p_attr_md = &attr_md;
attr_char_value.init_len = sizeof(ble_uis_led_t);
attr_char_value.init_offs = 0;
attr_char_value.max_len = sizeof(ble_uis_led_t);;
attr_char_value.p_value = ((uint8_t *)(p_uis_init->p_init_led));
return sd_ble_gatts_characteristic_add(p_uis->service_handle,
&char_md,
&attr_char_value,
&p_uis->led_char_handles);
}
uint32_t ble_uis_init(ble_uis_t * p_uis, const ble_uis_init_t * p_uis_init)
{
uint32_t err_code;
ble_uuid_t ble_uuid;
// Initialize service structure.
p_uis->conn_handle = BLE_CONN_HANDLE_INVALID;
p_uis->evt_handler = p_uis_init->evt_handler;
p_uis->led_write_handler = p_uis_init->led_write_handler;
p_uis->is_button_notif_enabled = false;
// Add service.
ble_uuid128_t base_uuid = LSPOT_BASE_UUID;
err_code = sd_ble_uuid_vs_add(&base_uuid, &p_uis->uuid_type);
VERIFY_SUCCESS(err_code);
ble_uuid.type = p_uis->uuid_type;
ble_uuid.uuid = BLE_IO_SERVICE;
err_code = sd_ble_gatts_service_add(BLE_GATTS_SRVC_TYPE_PRIMARY, &ble_uuid, &p_uis->service_handle);
VERIFY_SUCCESS(err_code);
// Add characteristics.
err_code = button_char_add(p_uis, p_uis_init);
VERIFY_SUCCESS(err_code);
err_code = led_char_add(p_uis, p_uis_init);
VERIFY_SUCCESS(err_code);
return NRF_SUCCESS;
}
uint32_t ble_uis_on_button_change(ble_uis_t * p_uis, uint8_t buttons_state)
{
ble_gatts_hvx_params_t params;
uint16_t len = sizeof(buttons_state);
VERIFY_PARAM_NOT_NULL(p_uis);
if ((p_uis->conn_handle == BLE_CONN_HANDLE_INVALID) || (!p_uis->is_button_notif_enabled))
{
return NRF_ERROR_INVALID_STATE;
}
memset(¶ms, 0, sizeof(params));
params.type = BLE_GATT_HVX_NOTIFICATION;
params.handle = p_uis->button_char_handles.value_handle;
params.p_data = (uint8_t *)(&buttons_state);
params.p_len = &len;
return sd_ble_gatts_hvx(p_uis->conn_handle, ¶ms);
}
please check here what is the problem
static uint32_t button_char_add(ble_uis_t * p_uis, const ble_uis_init_t * p_uis_init)
{
ble_gatts_char_md_t char_md;
ble_gatts_attr_md_t cccd_md;
ble_gatts_attr_t attr_char_value;
ble_uuid_t ble_uuid;
ble_gatts_attr_md_t attr_md;
uint8_t init_value = 0;
init_value = p_uis_init->charge;
memset(&cccd_md, 0, sizeof(cccd_md));
BLE_GAP_CONN_SEC_MODE_SET_OPEN(&cccd_md.read_perm);
BLE_GAP_CONN_SEC_MODE_SET_OPEN(&cccd_md.write_perm);
cccd_md.vloc = BLE_GATTS_VLOC_STACK;
memset(&char_md, 0, sizeof(char_md));
char_md.char_props.read = 1;
// char_md.char_props.write = 1;
char_md.char_props.notify = 1;
char_md.p_char_user_desc = NULL;
char_md.p_char_pf = NULL;
char_md.p_user_desc_md = NULL;
char_md.p_cccd_md = &cccd_md;
char_md.p_sccd_md = NULL;
ble_uuid.type = p_uis->uuid_type;
ble_uuid.uuid = BLE_CHARGE_CHAR;
memset(&attr_md, 0, sizeof(attr_md));
BLE_GAP_CONN_SEC_MODE_SET_NO_ACCESS(&attr_md.read_perm);
BLE_GAP_CONN_SEC_MODE_SET_NO_ACCESS(&attr_md.write_perm);
attr_md.vloc = BLE_GATTS_VLOC_STACK;
attr_md.rd_auth = 0;
attr_md.wr_auth = 0;
attr_md.vlen = 0;
memset(&attr_char_value, 0, sizeof(attr_char_value));
attr_char_value.p_uuid = &ble_uuid;
attr_char_value.p_attr_md = &attr_md;
attr_char_value.init_len = sizeof(uint8_t);
attr_char_value.init_offs = 0;
attr_char_value.max_len = sizeof(uint8_t);
attr_char_value.p_value = ((uint8_t *)(&init_value));
return sd_ble_gatts_characteristic_add(p_uis->service_handle,
&char_md,
&attr_char_value,
&p_uis->button_char_handles);
}
NOTIF ENABLED :

WHEN READ BUTTON PRESSED: