Hi,
My problem has similarities with Case 250648 (for nRF52840):
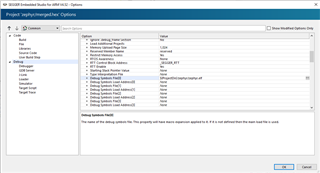
When trying to run your AT-client sample for the nRF9160 on your DK board, I cannot debug. Segger Embedded Studio gives the get the error "Failed to set startup completion breakpoint: main symbol not found"
This occurs for:
1. ncs v1.3.0-rc1 on windows 10 (a complete fresh install of 1909 with no other development tools) set up using the latest version of your Toolchain manager
2. ncs v1.3.0-rc1 on macOS Catalina set up using the following your http://developer.nordicsemi.com/nRF_Connect_SDK/doc/latest/nrf/ using a Python Virtual Environment (as described in my answer to case 250284).
This does not occur for:
3. ncs v1.0.0 set up on windows 10 following your http://developer.nordicsemi.com/nRF_Connect_SDK/doc/latest/nrf/.
4. ncs v1.2.0 on macOS Catalina set up using the following your http://developer.nordicsemi.com/nRF_Connect_SDK/doc/latest/nrf/ using a Python Virtual Environment.
My conclusion is that something is seriously wrong with v1.3.0-rc1.
You are often quick to inform that the latest master shouldn't be used, but I am forced to do this since I must implement A-GPS with does not work with the sample you provide with ncs v1.2.0 but does work with later version of that sample. Since you don't release any bug fixes to your tagged releases, it is extremely hard to know which code base to use.
Also, I guess the whole point with RC's is that they should be tested.
I have asked before which development environment you use most internally, but haven't got an answer. Given all the problems getting macOS Catalina to work and now this issue with the Windows environment, I wonder if you recokmmend Linux.
Best regards,
Per