
I am currently testing Optiga Trust X using an NRF52 DK. I am using armgcc as my toolchain.
The example provided by the nRF5 SDK v17.0.0 is a great starting point and I was able to fully test the Optiga functionalities.
Now, I am integrating the Optiga Trust X libs with my product codebase. So far, I have already included the required macros in the sdk_config.h, added the files to the makefile, got a successful compilation and run the code. However, to do so, since Optiga Trust X I2C Platform Abstraction Layer (PAL) provided by Nordic uses the legacy TWI drivers and the twi manager, I needed to remove my code that uses the nrfx_twim driver. Otherwise the application of the nrfx_glue and legacy porting layer messes up compilation by defining the legacy drivers and undefining the nrfx so much that I cannot get an executable.
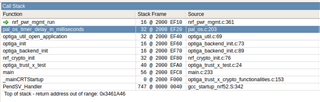
As far as I am aware, nrfx_twim cannot coexist with nrf_drv or nrf_twi_mngr, so I started porting the I2C NRF PAL to use only the nrfx_twim. The port was apparently successful, since the code compiles, but when running the code, it gets stuck __SEV(), on nrf_pwr_mgmt_run call, on line 361 of nrf_pwr_mgmt.c, which contains:
// Wait for an event. __WFE(); // Clear the internal event register. __SEV(); __WFE();
My port of the to the nrfx_twim is attached below. Please note that I am using a blocking call, but have also tested using a non-blocking call with a twim_handler and it causes the same result. The call stack is in the following image.
/**
* MIT License
*
* Copyright (c) 2018 Infineon Technologies AG
*
* Permission is hereby granted, free of charge, to any person obtaining a copy
* of this software and associated documentation files (the "Software"), to deal
* in the Software without restriction, including without limitation the rights
* to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
* copies of the Software, and to permit persons to whom the Software is
* furnished to do so, subject to the following conditions:
*
* The above copyright notice and this permission notice shall be included in all
* copies or substantial portions of the Software.
*
* THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
* IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
* FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
* AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
* LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
* OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE
* SOFTWARE
*
*
* \file
*
* \brief This file implements the platform abstraction layer(pal) APIs for I2C.
*
* \addtogroup grPAL
* @{
*/
/**********************************************************************************************************************
* HEADER FILES
*********************************************************************************************************************/
#include "optiga/pal/pal_i2c.h"
#include "optiga/ifx_i2c/ifx_i2c.h"
#include "pal_pin_config.h"
#include "nrfx_twim.h"
#include <stdbool.h>
/// @cond hidden
/**********************************************************************************************************************
* MACROS
*********************************************************************************************************************/
#define PAL_I2C_MASTER_MAX_BITRATE (400)
/** @brief I2C driver instance */
#define TWI_INSTANCE_ID 0
/** @brief Maximal number of pending I2C transactions */
//#define MAX_PENDING_TRANSACTIONS 5
/*********************************************************************************************************************
* LOCAL DATA
*********************************************************************************************************************/
/* Pointer to the current pal i2c context */
static pal_i2c_t * gp_pal_i2c_current_ctx;
/** @brief Definition of TWI manager instance */
#ifndef IFX_2GO_SUPPORT
//NRF_TWI_MNGR_DEF(m_app_twi, MAX_PENDING_TRANSACTIONS, TWI_INSTANCE_ID);
const nrfx_twim_t m_app_twi = NRFX_TWIM_INSTANCE(TWI_INSTANCE_ID);
#else
const nrfx_twim_t m_app_twi = NRFX_TWIM_INSTANCE(TWI_INSTANCE_ID);
//nrf_twi_mngr_t m_app_twi;
#endif
/** @brief Definition of TWI manager transfer instance */
//static nrf_twi_mngr_transfer_t m_transfer;
/** @brief Definition of TWI manager transaction instance */
//static nrf_twi_mngr_transaction_t m_transaction;
static bool initialized = false;
/**********************************************************************************************************************
* LOCAL ROUTINES
*********************************************************************************************************************/
/**
* Pal I2C event handler function to invoke the registered upper layer callback<br>
*
*<b>API Details:</b>
* - This function implements the platform specific i2c event handling mechanism<br>
* - It calls the registered upper layer function after completion of the I2C read/write operations<br>
* - The respective event status are explained below.
* - #PAL_I2C_EVENT_ERROR when I2C fails due to low level failures(NACK/I2C protocol errors)
* - #PAL_I2C_EVENT_SUCCESS when operation is successfully completed
*
* \param[in] p_pal_i2c_ctx Pointer to the pal i2c context #pal_i2c_t
* \param[in] event Status of the event reported after read/write completion or due to I2C errors
*
*/
static void app_twi_callback(ret_code_t result, void * p_user_data)
{
app_event_handler_t upper_layer_handler;
//lint --e{611} suppress "void* function pointer is type casted to app_event_handler_t type"
upper_layer_handler = (app_event_handler_t)gp_pal_i2c_current_ctx->upper_layer_event_handler;
if (result == NRF_SUCCESS)
{
upper_layer_handler(gp_pal_i2c_current_ctx->upper_layer_ctx, PAL_I2C_EVENT_SUCCESS);
}
else
{
upper_layer_handler(gp_pal_i2c_current_ctx->upper_layer_ctx, PAL_I2C_EVENT_ERROR);
}
}
/// @endcond
/**********************************************************************************************************************
* API IMPLEMENTATION
*********************************************************************************************************************/
/**
* API to initialize the i2c master with the given context.
* <br>
*
*<b>API Details:</b>
* - The platform specific initialization of I2C master has to be implemented as part of this API, if required.<br>
* - If the target platform does not demand explicit initialization of i2c master
* (Example: If the platform driver takes care of init after the reset), it would not be required to implement.<br>
* - The implementation must take care the following scenarios depending upon the target platform selected.
* - The implementation must handle the acquiring and releasing of the I2C bus before initializing the I2C master to
* avoid interrupting the ongoing slave I2C transactions using the same I2C master.
* - If the I2C bus is in busy state, the API must not initialize and return #PAL_STATUS_I2C_BUSY status.
* - Repeated initialization must be taken care with respect to the platform requirements. (Example: Multiple users/applications
* sharing the same I2C master resource)
*
*<b>User Input:</b><br>
* - The input #pal_i2c_t p_i2c_context must not be NULL.<br>
*
* \param[in] p_i2c_context Pal i2c context to be initialized
*
* \retval #PAL_STATUS_SUCCESS Returns when the I2C master init it successfull
* \retval #PAL_STATUS_FAILURE Returns when the I2C init fails.
*/
pal_status_t pal_i2c_init(const pal_i2c_t* p_i2c_context)
{
#ifndef IFX_2GO_SUPPORT
const nrfx_twim_config_t config = {
.scl = OPTIGA_PIN_I2C_SCL,
.sda = OPTIGA_PIN_I2C_SDA,
.frequency = NRF_TWIM_FREQ_400K,
.interrupt_priority = NRFX_TWIM_DEFAULT_CONFIG_IRQ_PRIORITY,
.hold_bus_uninit = NRFX_TWIM_DEFAULT_CONFIG_HOLD_BUS_UNINIT
};
#else
#include "ifx_2go_common.h"
nrfx_twim_config_t const config = {
.scl = ifx_2go_pin_config()->scl,
.sda = ifx_2go_pin_config()->sda,
.frequency = NRF_TWI_FREQ_400K,
.interrupt_priority = APP_IRQ_PRIORITY_LOWEST,
.hold_bus_uninit = false
};
#endif
if(initialized)
{
nrfx_twim_uninit(&m_app_twi);
}
// Initialize I2C driver
if (nrfx_twim_init(&m_app_twi, &config, NULL, NULL) != NRF_SUCCESS)
{
return PAL_STATUS_FAILURE;
}
nrfx_twim_enable(&m_app_twi);
initialized = true;
return PAL_STATUS_SUCCESS;
}
/**
* API to de-initialize the I2C master with the specified context.
* <br>
*
*<b>API Details:</b>
* - The platform specific de-initialization of I2C master has to be implemented as part of this API, if required.<br>
* - If the target platform does not demand explicit de-initialization of i2c master
* (Example: If the platform driver takes care of init after the reset), it would not be required to implement.<br>
* - The implementation must take care the following scenarios depending upon the target platform selected.
* - The implementation must handle the acquiring and releasing of the I2C bus before de-initializing the I2C master to
* avoid interrupting the ongoing slave I2C transactions using the same I2C master.
* - If the I2C bus is in busy state, the API must not de-initialize and return #PAL_STATUS_I2C_BUSY status.
* - This API must ensure that multiple users/applications sharing the same I2C master resource is not impacted.
*
*<b>User Input:</b><br>
* - The input #pal_i2c_t p_i2c_context must not be NULL.<br>
*
* \param[in] p_i2c_context I2C context to be de-initialized
*
* \retval #PAL_STATUS_SUCCESS Returns when the I2C master de-init it successfull
* \retval #PAL_STATUS_FAILURE Returns when the I2C de-init fails.
*/
pal_status_t pal_i2c_deinit(const pal_i2c_t* p_i2c_context)
{
if(initialized) {
nrfx_twim_uninit(&m_app_twi);
}
initialized = false;
return PAL_STATUS_SUCCESS;
}
/**
* Platform abstraction layer API to write the data to I2C slave.
* <br>
* <br>
* \image html pal_i2c_write.png "pal_i2c_write()" width=20cm
*
*
*<b>API Details:</b>
* - The API attempts to write if the I2C bus is free, else it returns busy status #PAL_STATUS_I2C_BUSY<br>
* - The bus is released only after the completion of transmission or after completion of error handling.<br>
* - The API invokes the upper layer handler with the respective event status as explained below.
* - #PAL_I2C_EVENT_BUSY when I2C bus in busy state
* - #PAL_I2C_EVENT_ERROR when API fails
* - #PAL_I2C_EVENT_SUCCESS when operation is successfully completed asynchronously
*<br>
*
*<b>User Input:</b><br>
* - The input #pal_i2c_t p_i2c_context must not be NULL.<br>
* - The upper_layer_event_handler must be initialized in the p_i2c_context before invoking the API.<br>
*
*<b>Notes:</b><br>
* - Otherwise the below implementation has to be updated to handle different bitrates based on the input context.<br>
* - The caller of this API must take care of the guard time based on the slave's requirement.<br>
*
* \param[in] p_i2c_context Pointer to the pal I2C context #pal_i2c_t
* \param[in] p_data Pointer to the data to be written
* \param[in] length Length of the data to be written
*
* \retval #PAL_STATUS_SUCCESS Returns when the I2C write is invoked successfully
* \retval #PAL_STATUS_FAILURE Returns when the I2C write fails.
* \retval #PAL_STATUS_I2C_BUSY Returns when the I2C bus is busy.
*/
pal_status_t pal_i2c_write(pal_i2c_t* p_i2c_context,uint8_t* p_data , uint16_t length)
{
gp_pal_i2c_current_ctx = p_i2c_context;
/*
m_transfer.p_data = p_data;
m_transfer.length = length;
m_transfer.operation = NRF_TWI_MNGR_WRITE_OP(IFX_I2C_BASE_ADDR);
m_transfer.flags = 0;
m_transaction.callback = app_twi_callback;
m_transaction.number_of_transfers = 1;
m_transaction.p_required_twi_cfg = NULL;
m_transaction.p_transfers = &m_transfer;
m_transaction.p_user_data = (void*) PAL_STATUS_SUCCESS;
*/
nrfx_twim_xfer_desc_t tx_xfer = NRFX_TWIM_XFER_DESC_TX(IFX_I2C_BASE_ADDR, p_data, length);
if (nrfx_twim_xfer(&m_app_twi, &tx_xfer, 0) != NRF_SUCCESS)
{
app_twi_callback(NRF_ERROR_BUSY, 0);
}
return PAL_STATUS_SUCCESS;
}
/**
* Platform abstraction layer API to read the data from I2C slave.
* <br>
* <br>
* \image html pal_i2c_read.png "pal_i2c_read()" width=20cm
*
*<b>API Details:</b>
* - The API attempts to read if the I2C bus is free, else it returns busy status #PAL_STATUS_I2C_BUSY<br>
* - The bus is released only after the completion of reception or after completion of error handling.<br>
* - The API invokes the upper layer handler with the respective event status as explained below.
* - #PAL_I2C_EVENT_BUSY when I2C bus in busy state
* - #PAL_I2C_EVENT_ERROR when API fails
* - #PAL_I2C_EVENT_SUCCESS when operation is successfully completed asynchronously
*<br>
*
*<b>User Input:</b><br>
* - The input #pal_i2c_t p_i2c_context must not be NULL.<br>
* - The upper_layer_event_handler must be initialized in the p_i2c_context before invoking the API.<br>
*
*<b>Notes:</b><br>
* - Otherwise the below implementation has to be updated to handle different bitrates based on the input context.<br>
* - The caller of this API must take care of the guard time based on the slave's requirement.<br>
*
* \param[in] p_i2c_context pointer to the PAL i2c context #pal_i2c_t
* \param[in] p_data Pointer to the data buffer to store the read data
* \param[in] length Length of the data to be read
*
* \retval #PAL_STATUS_SUCCESS Returns when the I2C read is invoked successfully
* \retval #PAL_STATUS_FAILURE Returns when the I2C read fails.
* \retval #PAL_STATUS_I2C_BUSY Returns when the I2C bus is busy.
*/
pal_status_t pal_i2c_read(pal_i2c_t* p_i2c_context , uint8_t* p_data , uint16_t length)
{
gp_pal_i2c_current_ctx = p_i2c_context;
/*
m_transfer.p_data = p_data;
m_transfer.length = length;
m_transfer.operation = NRF_TWI_MNGR_READ_OP(IFX_I2C_BASE_ADDR);
m_transfer.flags = 0;
m_transaction.callback = app_twi_callback;
m_transaction.number_of_transfers = 1;
m_transaction.p_required_twi_cfg = 0;
m_transaction.p_transfers = &m_transfer;
m_transaction.p_user_data = (void*) PAL_STATUS_SUCCESS;
*/
nrfx_twim_xfer_desc_t rx_xfer = NRFX_TWIM_XFER_DESC_RX(IFX_I2C_BASE_ADDR, p_data, length);
if (nrfx_twim_xfer(&m_app_twi, &rx_xfer, 0) != NRF_SUCCESS)
{
app_twi_callback(NRF_ERROR_BUSY, 0);
}
return PAL_STATUS_SUCCESS;
}
/**
* Platform abstraction layer API to set the bitrate/speed(KHz) of I2C master.
* <br>
*
*<b>API Details:</b>
* - Sets the bitrate of I2C master if the I2C bus is free, else it returns busy status #PAL_STATUS_I2C_BUSY<br>
* - The bus is released after the setting the bitrate.<br>
* - This API must take care of setting the bitrate to I2C master's maximum supported value.
* - Eg. In XMC4500, the maximum supported bitrate is 400 KHz. If the supplied bitrate is greater than 400KHz, the API will
* set the I2C master's bitrate to 400KHz.
* - Use the #PAL_I2C_MASTER_MAX_BITRATE macro to specify the maximum supported bitrate value for the target platform.
* - If upper_layer_event_handler is initialized, the upper layer handler is invoked with the respective event
* status listed below.
* - #PAL_I2C_EVENT_BUSY when I2C bus in busy state
* - #PAL_I2C_EVENT_ERROR when API fails to set the bit rate
* - #PAL_I2C_EVENT_SUCCESS when operation is successful
*<br>
*
*<b>User Input:</b><br>
* - The input #pal_i2c_t p_i2c_context must not be NULL.<br>
*
* \param[in] p_i2c_context Pointer to the pal i2c context
* \param[in] bitrate Bitrate to be used by i2c master in KHz
*
* \retval #PAL_STATUS_SUCCESS Returns when the setting of bitrate is successfully completed
* \retval #PAL_STATUS_FAILURE Returns when the setting of bitrate fails.
* \retval #PAL_STATUS_I2C_BUSY Returns when the I2C bus is busy.
*/
pal_status_t pal_i2c_set_bitrate(const pal_i2c_t* p_i2c_context , uint16_t bitrate)
{
// Bitrate is fixed to the maximum frequency on this platform (400K)
return PAL_STATUS_SUCCESS;
}
#ifdef IFX_2GO_SUPPORT
pal_status_t pal_i2c_set_instance(nrfx_twim_t* twi_inst)
{
m_app_twi = *twi_inst;
}
#endif/*IFX_2GO_SUPPORT*/
/**
* @}
*/
I have two questions:
1. Is not possible to use, on the same application, nrf_drv_ + nrf_twi_mgnr and a nrfx_twim drivers, even if the former controls the TWI0 and the latter the TWIM1, correct?
2. Why am I getting stuck on the pwr_mgmt_run routine and what can be done to fix it?
Best regards,
Pedro


