
Hello
I am working on mpu6050 sensor in sdk v14.
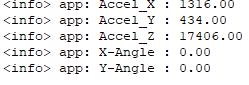
I succeeded in obtaining the acceleration value of this. I'm trying to get the angle of the sensor using this value.
I searched the Internet and used a formula to obtain angles using acceleration values. However, as shown in the picture below, the value of the angle is only zero.
This is my main.c code.
#include <stdbool.h>
#include <stdint.h>
#include <string.h>
#include "nordic_common.h"
#include "nrf.h"
#include "app_error.h"
#include "app_timer.h"
#include "nrf_delay.h"
#include "app_mpu.h"
#include "nrf_log.h"
#include "nrf_log_ctrl.h"
#include "nrf_log_default_backends.h"
volatile bool start_accel_update_flag = false;
void timer_accel_update_handler(void * p_context)
{
start_accel_update_flag = true;
}
/**@brief Function for initializing the nrf log module.
*/
static void log_init(void)
{
ret_code_t err_code = NRF_LOG_INIT(NULL);
APP_ERROR_CHECK(err_code);
NRF_LOG_DEFAULT_BACKENDS_INIT();
}
void mpu_init(void)
{
ret_code_t ret_code;
// Initiate MPU driver
ret_code = app_mpu_init();
APP_ERROR_CHECK(ret_code); // Check for errors in return value
// Setup and configure the MPU with intial values
app_mpu_config_t p_mpu_config = MPU_DEFAULT_CONFIG(); // Load default values
p_mpu_config.smplrt_div = 19; // Change sampelrate. Sample Rate = Gyroscope Output Rate / (1 + SMPLRT_DIV). 19 gives a sample rate of 50Hz
p_mpu_config.accel_config.afs_sel = AFS_2G; // Set accelerometer full scale range to 2G
p_mpu_config.gyro_config.fs_sel = AFS_2G;
ret_code = app_mpu_config(&p_mpu_config); // Configure the MPU with above values
APP_ERROR_CHECK(ret_code); // Check for errors in return value
}
/**@brief Function for application main entry.
*/
int main(void)
{
uint32_t err_code;
bool erase_bonds;
// Initialize.
log_init();
NRF_LOG_INFO("\033[2J\033[;H"); // Clear screen
mpu_init();
// Start execution.
NRF_LOG_INFO("MPU simple example.");
accel_values_t accel_values;
gyro_values_t gyro_values;
// Enter main loop.
for (;;)
{
if (NRF_LOG_PROCESS() == false)
{
app_mpu_read_accel(&accel_values);
app_mpu_read_gyro(&gyro_values);
err_code = app_mpu_read_accel(&accel_values);
APP_ERROR_CHECK(err_code);
err_code = app_mpu_read_accel(&gyro_values);
APP_ERROR_CHECK(err_code);
//float accel_x = accel_values.x * 4.0 / 32768.0; //same nano33ble lsm9ds1 sensor value
//float accel_y = accel_values.y * 4.0 / 32768.0;
//float accel_z = accel_values.z * 4.0 / 32768.0;
float accel_x = accel_values.x;
float accel_y = accel_values.y;
float accel_z = accel_values.z;
//Angle formula
float RADIAN_TO_DEGREES = 180/3.14139;
float val_x = atan(accel_y/sqrt(pow(accel_x,2) + pow(accel_z,2))) * RADIAN_TO_DEGREES; //X slope
float val_y = atan(accel_x/sqrt(pow(accel_y,2) + pow(accel_z,2))) * RADIAN_TO_DEGREES; //Y slope
//Accel value
NRF_LOG_INFO("Accel_X : "NRF_LOG_FLOAT_MARKER"", NRF_LOG_FLOAT(accel_x)); //float print
NRF_LOG_INFO("Accel_Y : "NRF_LOG_FLOAT_MARKER"", NRF_LOG_FLOAT(accel_y));
NRF_LOG_INFO("Accel_Z : "NRF_LOG_FLOAT_MARKER"", NRF_LOG_FLOAT(accel_z));
//Angle value
NRF_LOG_INFO("X-Angle : "NRF_LOG_FLOAT_MARKER"", NRF_LOG_FLOAT(val_x)); //float print
NRF_LOG_INFO("Y-Angle : "NRF_LOG_FLOAT_MARKER"", NRF_LOG_FLOAT(val_y));
nrf_delay_ms(1000);
start_accel_update_flag = false;
}
}
}
I tried debugging, but I couldn't find the cause of the problem.
Can I know the problem with this?
Thank you.
