
I'm trying to create a siren tone using the pwm library, that ramps up and down between 2kHz and 3kHz.
Initially I started with the example provided in SDK v15.3.0
nRF5_SDK\examples\peripheral\pwm_library
using this with the nrf52840 DK.
Example was working with 2kHz @ 30% duty.
I attempted to modify the example to allow for frequency shifts, but the output waveform is not as expected.
Here is the example output as expected with fixed frequency: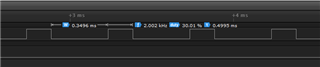
This is the attempted frequency shift with edges in the spaces that I cannot make sense of at the moment: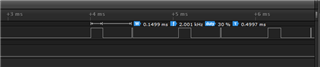
Ignoring the dodgy uS increment 
Here is the code snippet of the attempt.
APP_PWM_INSTANCE(PWM1,1); // Create the instance "PWM1" using TIMER1.
static volatile bool ready_flag; // A flag indicating PWM status.
void pwm_ready_callback(uint32_t pwm_id) // PWM callback function
{
ready_flag = true;
app_pwm_disable(&PWM1);
app_pwm_uninit(&PWM1);
}
static const uint32_t base_frequency = 500; //in us or 2kHz
int main(void)
{
ret_code_t err_code;
/* 2-channel PWM, 200Hz, output on DK LED pins. */
//static app_pwm_config_t pwm1_cfg = APP_PWM_DEFAULT_CONFIG_1CH(500, 30);
static app_pwm_config_t pwm1_cfg = {
.pins = {30, APP_PWM_NOPIN},
.pin_polarity = {APP_PWM_POLARITY_ACTIVE_HIGH, APP_PWM_POLARITY_ACTIVE_LOW},
.num_of_channels = 1,
.period_us = base_frequency
};
/* Initialize and enable PWM. */
err_code = app_pwm_init(&PWM1,&pwm1_cfg,pwm_ready_callback);
APP_ERROR_CHECK(err_code);
app_pwm_enable(&PWM1);
app_pwm_channel_duty_set(&PWM1, 0, 30);
while (true)
{
ready_flag = false;
/* ... or wait for callback. */
while (!ready_flag);
pwm1_cfg.period_us += 10;
err_code = app_pwm_init(&PWM1,&pwm1_cfg,pwm_ready_callback);
APP_ERROR_CHECK(err_code);
app_pwm_enable(&PWM1);
app_pwm_channel_duty_set(&PWM1, 0, 30);
}
}
/** @} */
I'm not entirely sure what is going wrong here, and I'm not sure what the intended method for updating frequency with the APP_PWM library.
Secondly, what does the PWM state change busy and ready mean? Does ready occur on full period, or duty set?
Ideally, I would like to get the timer->PPI->GPIOTE method working as one of targets does not have PWM peripherals.
I'm hoping I'm missing something very simple. Thanks in advance.


