Hi,
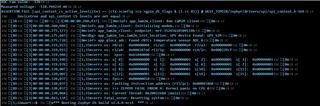
I got SPI working when writing to the CS pins directly. I thought however it might shorten the SPI acces when using spi_cs_control. When executing the code I will however get an error on the first spi_transceive:

Here is my code:
#include <nrf9160.h>
#include <drivers/spi.h>
#include <drivers/gpio.h>
#include <zephyr.h>
#include "qlocx_digio.h"
#include <logging/log.h>
//*************************** Definitions ***********************************
LOG_MODULE_REGISTER(app_qlocx_digio, CONFIG_APP_LOG_LEVEL);
#define CHECK_DELAY 2 // Check every 10 ms
#define TURN_OFF_DELAY 5
//#define AUTO_RESET
#define OLD_ON_OUT1 0x0100
#define OLD_ON_OUT2 0x0200
#define OLD_ON_OUT3 0x0400
#define OLD_ON_OUT4 0x0800
#define OLD_ON_OUT5 0x1000
#define OLD_ON_OUT6 0x2000
#define OLD_ON_OUT7 0x4000
#define OLD_ON_OUT8 0x8000
#define OPEN_LOAD_DETECT (OLD_ON_OUT1 | OLD_ON_OUT2 | OLD_ON_OUT3 | OLD_ON_OUT4 | OLD_ON_OUT5 | OLD_ON_OUT6 | OLD_ON_OUT7 | OLD_ON_OUT8 )
static struct device * gpio_dev;
static struct device * spi_dev;
static uint16_t last_output = 0x0000;
static uint16_t last_status = 0x0000;
static bool out_state[MAX_OUTPUT];
//*************************** Internal functions ****************************
static struct spi_cs_control cs_pwr1 = {
.delay = 1,
.gpio_dev = NULL,
.gpio_pin = 25,
};
static struct spi_cs_control cs_pwr2 = {
.delay = 1,
.gpio_dev = NULL,
.gpio_pin = 18,
};
static struct spi_config spi_cfg_pwr1 = {
.operation = SPI_WORD_SET(8) | SPI_TRANSFER_MSB |
SPI_MODE_CPHA,
.frequency = 4000000,
.slave = 0,
.cs = &cs_pwr1,
};
static struct spi_config spi_cfg_pwr2 = {
.operation = SPI_WORD_SET(8) | SPI_TRANSFER_MSB |
SPI_MODE_CPHA,
.frequency = 4000000,
.slave = 0,
.cs = &cs_pwr2,
};
static void spi_init(void)
{
const char* spiName = "SPI_3";
spi_dev = device_get_binding(spiName);
if (spi_dev == NULL) {
printk("Could not get %s device\n", spiName);
return;
}
}
// Set output
// ch = 0 - 15; state = true or false
void spi_Out(uint8_t ch, uint8_t state)
{
uint16_t output;
uint16_t data;
int err;
static uint8_t tx_buffer[2];
static uint8_t rx_buffer[2];
const struct spi_buf tx_buf = {
.buf = tx_buffer,
.len = sizeof(tx_buffer)
};
const struct spi_buf_set tx = {
.buffers = &tx_buf,
.count = 1
};
struct spi_buf rx_buf = {
.buf = rx_buffer,
.len = sizeof(rx_buffer),
};
const struct spi_buf_set rx = {
.buffers = &rx_buf,
.count = 1
};
gpio_pin_set(gpio_dev, 23, 1); // EN_PWR
/*
if( ch < OPEN_DOOR9){
gpio_pin_set(gpio_dev, 18, 0); // CS_PWR2 passive
gpio_pin_set(gpio_dev, 25, 1); // CS_PWR1 active
}
else{
gpio_pin_set(gpio_dev, 25, 0); // CS_PWR1 passive
gpio_pin_set(gpio_dev, 18, 1); // CS_PWR2 active
}
data = 1 << ch;
if(state){
last_output |= data;
}
else{
last_output &= ~data;
}
if( ch < OPEN_DOOR9){
output = last_output | OPEN_LOAD_DETECT;
}
else{
output = (uint16_t)(last_output >> 8 ) | OPEN_LOAD_DETECT;
}
tx_buffer[1] = output & 0xFF;
tx_buffer[0] = output >> 8;
err = spi_transceive(spi_dev, &spi_cfg, &tx, &rx);
if( ch < OPEN_DOOR9){
last_status &= 0xFF00;
last_status |= rx_buffer[0];
}
else{
last_status &= 0x00FF;
last_status |= rx_buffer[0] << 8;
}
gpio_pin_set(gpio_dev, 25, 0); // CS_PWR1 passive
gpio_pin_set(gpio_dev, 18, 0); // CS_PWR2 passive
//gpio_pin_set(gpio_dev, 23, 0); // EN_PWR passive
*/
data = 1 << ch;
if(state){
last_output |= data;
}
else{
last_output &= ~data;
}
if( ch < OPEN_DOOR9){
output = last_output | OPEN_LOAD_DETECT;
}
else{
output = (uint16_t)(last_output >> 8 ) | OPEN_LOAD_DETECT;
}
tx_buffer[1] = output & 0xFF;
tx_buffer[0] = output >> 8;
if( ch < OPEN_DOOR9){
err = spi_transceive(spi_dev, &spi_cfg_pwr1, &tx, &rx);
}
else{
err = spi_transceive(spi_dev, &spi_cfg_pwr2, &tx, &rx);
}
if( ch < OPEN_DOOR9){
last_status &= 0xFF00;
last_status |= rx_buffer[0];
}
else{
last_status &= 0x00FF;
last_status |= rx_buffer[0] << 8;
}
}
//*************************** External functions ****************************
void digio_Init(void)
{
uint8_t i;
spi_init();
gpio_dev = device_get_binding("GPIO_0");
if (!gpio_dev) {
LOG_ERR("Could not get GPIO_0 device.");
}
cs_pwr1.gpio_dev = gpio_dev;
cs_pwr2.gpio_dev = gpio_dev;
if(gpio_pin_configure(gpio_dev, 0, GPIO_INPUT | GPIO_ACTIVE_LOW) < 0){
LOG_ERR("Could not configure P0.0.");
}
if(gpio_pin_configure(gpio_dev, 1, GPIO_INPUT | GPIO_ACTIVE_LOW) < 0){
LOG_ERR("Could not configure P0.1.");
}
if(gpio_pin_configure(gpio_dev, 2, GPIO_INPUT | GPIO_ACTIVE_LOW) < 0){
LOG_ERR("Could not configure P0.2.");
}
if(gpio_pin_configure(gpio_dev, 3, GPIO_INPUT | GPIO_ACTIVE_LOW) < 0){
LOG_ERR("Could not configure P0.3.");
}
if(gpio_pin_configure(gpio_dev, 4, GPIO_INPUT | GPIO_ACTIVE_LOW) < 0){
LOG_ERR("Could not configure P0.4.");
}
if(gpio_pin_configure(gpio_dev, 5, GPIO_INPUT | GPIO_ACTIVE_LOW) < 0){
LOG_ERR("Could not configure P0.5.");
}
if(gpio_pin_configure(gpio_dev, 6, GPIO_INPUT | GPIO_ACTIVE_LOW) < 0){
LOG_ERR("Could not configure P0.6.");
}
if(gpio_pin_configure(gpio_dev, 7, GPIO_INPUT | GPIO_ACTIVE_LOW) < 0){
LOG_ERR("Could not configure P0.7.");
}
if(gpio_pin_configure(gpio_dev, 8, GPIO_INPUT | GPIO_ACTIVE_LOW) < 0){
LOG_ERR("Could not configure P0.8.");
}
if(gpio_pin_configure(gpio_dev, 9, GPIO_INPUT | GPIO_ACTIVE_LOW) < 0){
LOG_ERR("Could not configure P0.9.");
}
if(gpio_pin_configure(gpio_dev, 10, GPIO_INPUT | GPIO_ACTIVE_LOW) < 0){
LOG_ERR("Could not configure P0.10.");
}
if(gpio_pin_configure(gpio_dev, 11, GPIO_INPUT | GPIO_ACTIVE_LOW) < 0){
LOG_ERR("Could not configure P0.11.");
}
if(gpio_pin_configure(gpio_dev, 12, GPIO_INPUT | GPIO_ACTIVE_LOW) < 0){
LOG_ERR("Could not configure P0.12.");
}
if(gpio_pin_configure(gpio_dev, 13, GPIO_INPUT | GPIO_ACTIVE_LOW) < 0){
LOG_ERR("Could not configure P0.13.");
}
if(gpio_pin_configure(gpio_dev, 14, GPIO_INPUT | GPIO_ACTIVE_LOW) < 0){
LOG_ERR("Could not configure P0.14.");
}
if(gpio_pin_configure(gpio_dev, 15, GPIO_INPUT | GPIO_ACTIVE_LOW) < 0){
LOG_ERR("Could not configure P0.15.");
}
if(gpio_pin_configure(gpio_dev, 18, GPIO_OUTPUT | GPIO_ACTIVE_LOW) < 0){
LOG_ERR("Could not configure P0.18.");
}
if(gpio_pin_configure(gpio_dev, 23, GPIO_OUTPUT | GPIO_ACTIVE_HIGH) < 0){
LOG_ERR("Could not configure P0.23.");
}
if(gpio_pin_configure(gpio_dev, 24, GPIO_OUTPUT | GPIO_ACTIVE_HIGH) < 0){
LOG_ERR("Could not configure P0.24.");
}
if(gpio_pin_configure(gpio_dev, 25, GPIO_OUTPUT | GPIO_ACTIVE_LOW) < 0){
LOG_ERR("Could not configure P0.25.");
}
for(i = 0;i <MAX_OUTPUT;i++){
digio_Out(i, 0);
}
}
I can not find any documentation on gpio_dt_flags. Maybe spi_cs_control is just not supported for nRF9160??
Best regards
Dirk