
Hello,
We are planning to use the accelerometer in the Thingy91, we have some inconsistent results when configuring/reconfiguring, we have 2 questions:
- When we, for example, want to change the thresholds while running, we write the values in the corresponding registers, is there anything else to do so the accel starts using the new values? Does the accel need to be reset somehow?
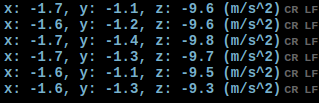
- See attached a typical sequence of measurments when running the adxl362 sample included with zephyr. The z axis is measuring earths gravitation, but why the other two axis are consistently measuring values around -1.5 m/s^2? This is of course with the device motionless. Does the accel need to be calibrated somehow?
Thank you.
Xavier


